In the second implementation we built a customised auditory circuit for a Khepera robot. With this robot we could use real cricket songs as stimuli and replicate cricket experiments.
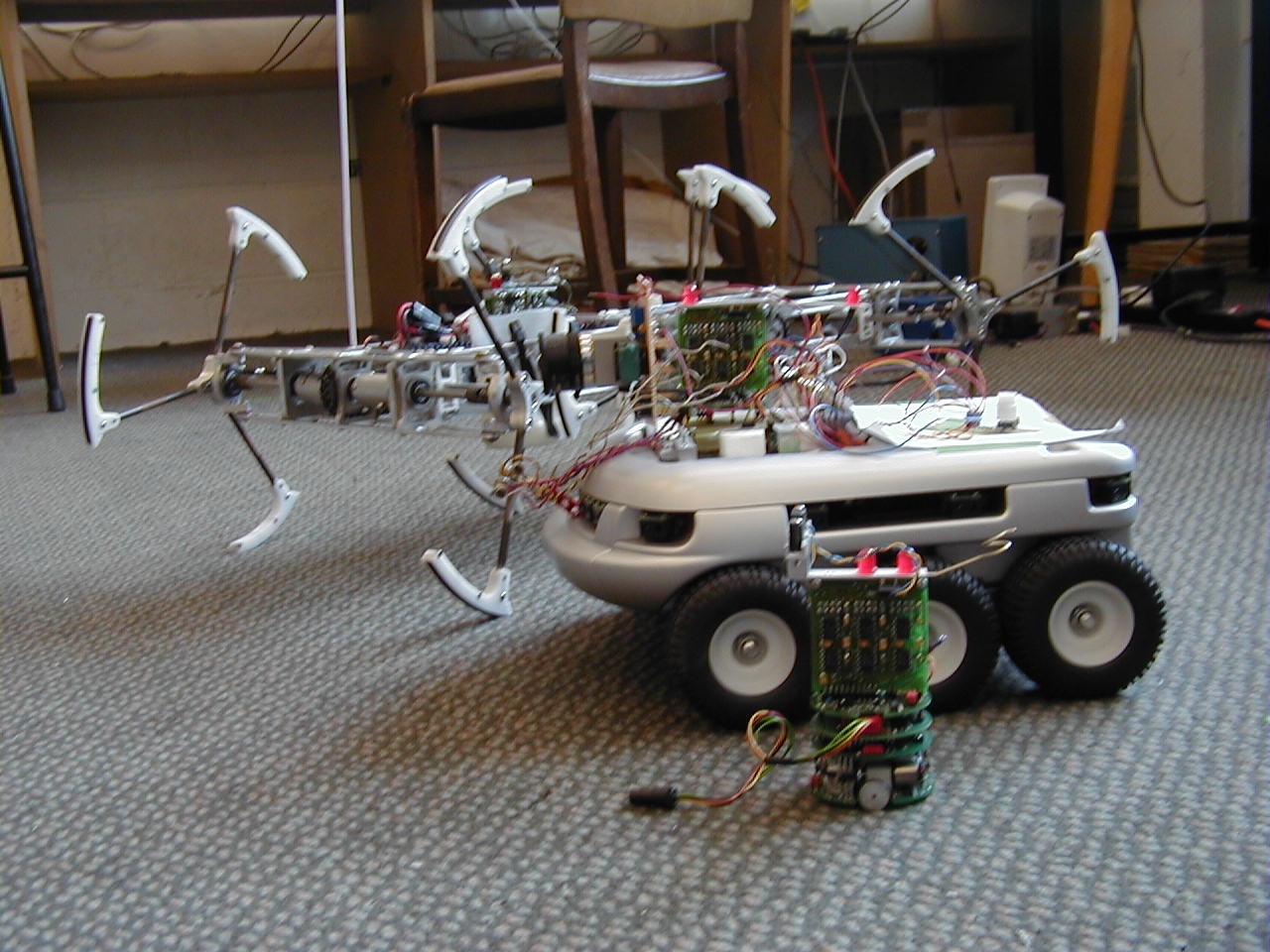 From left to right - Whegs,
Koala & Khepera robots used for recent phonotaxis experiments
From left to right - Whegs,
Koala & Khepera robots used for recent phonotaxis experiments
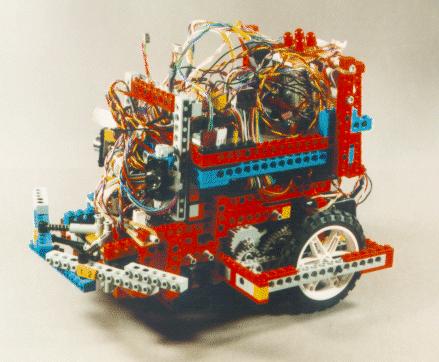
We have used several different robot bases in investigations. The original
cricket robot was built from Lego and used a 68000-clone controller, with
customised circuitry for its sensory systems.
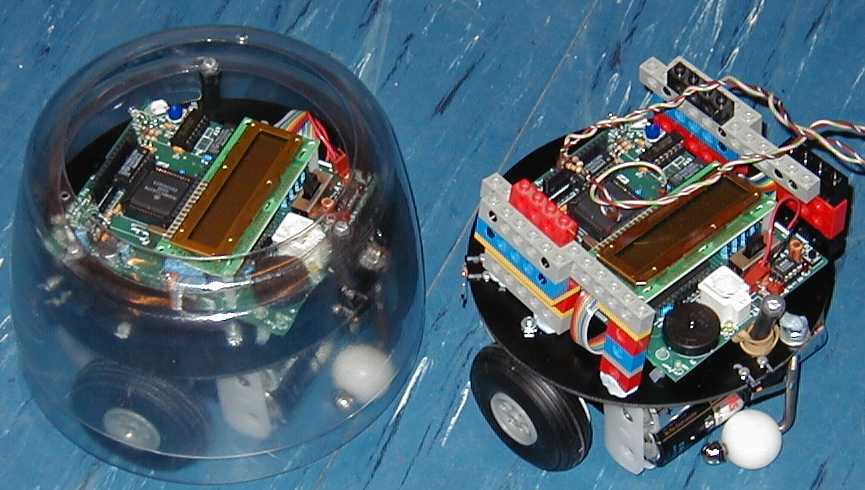
In the second implementation we built a customised auditory circuit
for a Khepera robot. With this robot
we could use real cricket songs as stimuli and replicate cricket experiments.
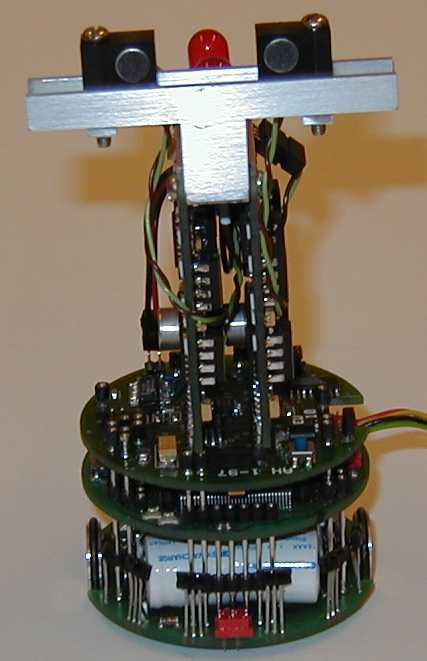
The Khepera is also being used in an investigation of cricket escape
behaviour by Tim Chapman.The small hairs on the back are wind sensors analogous
to cricket cerci..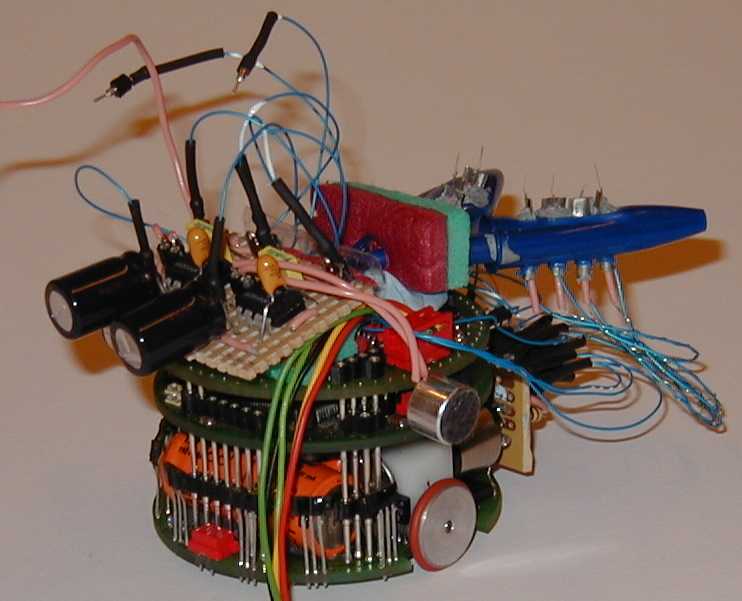
In addition to the Khepera we are now using Koala robot as the base
for our investigations of outdoor taxis with multiple control systems.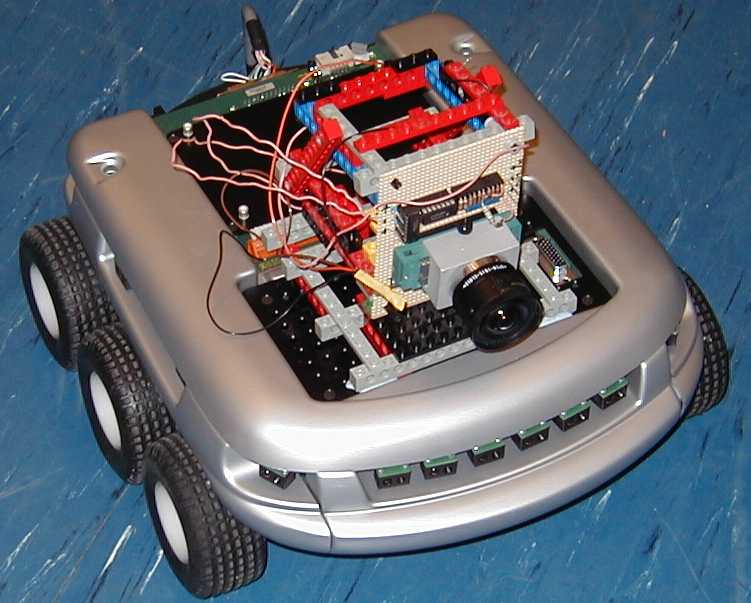
The final stage of this project will use a six-legged robot built in the biorobotics lab at CWRU
We also have some Rug-Warriors, used for other experiments and robot
projects in the lab.