early vision
earth mover's distance
eccentricity
echocardiography
edge
edge based segmentation
edge based stereo
edge detection
edge direction
edge enhancement
edge finding
edge following
edge gradient image
edge grouping
edge image
edge linking
edge magnitude
edge matching
edge motion
edge orientation
edge point
edge preserving smoothing
edge sharpening
edge tracking
edge type labeling
EGI
egomotion
egomotion estimation
eigenface
eigenspace based recognition
eigenspace representation
eigenvalue
eigenvector
eigenvector projection
electromagnetic spectrum
ellipse fitting
ellipsoid
elliptic snake
elongatedness
EM
empirical evaluation
encoding
endoscope
energy minimization
entropy
EPI
epipolar constraint
epipolar correspondence matching
epipolar geometry
epipolar line
epipolar plane image
epipolar plane analysis
epipolar plane motion
epipolar rectification
epipolar transfer
epipole
epipole location
equalization
erode operator
error propogation
essential matrix
Euclidean distance
Euclidean reconstruction
Euclidean space
Euclidean transformation
Euler angle
Euler number
Euler-Lagrange
even field
even function
event analysis
event detection
event understanding
exhaustive matching
expectation maximization
expectation value
expert system
exponential smoothing
exponential transformation
expression understanding
extended Gaussian image
extended light source
exterior orientation
external energy
extremal point
extrinsic camera parameters
eye location
eye tracking
early vision: A general term referring to the initial stages of computer vision (i.e. image capture and image processing ). Also known as low level vision .
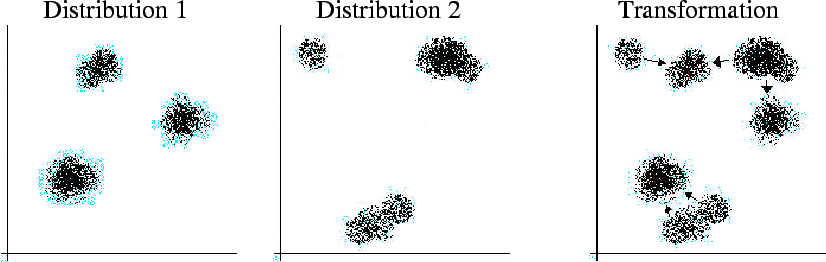
earth mover's distance: A metric for comparing two distributions by evaluating the minimum cost of transforming one distribution into the other (e.g. can be applied to color histogram matching ).
 |
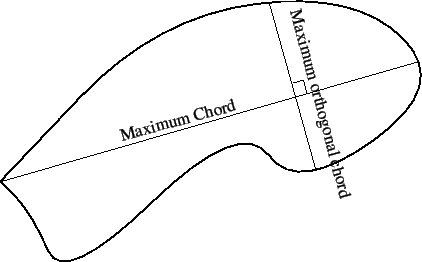
eccentricity: A shape representation that measures how non-circular a shape is. One way of computing this is to take the ratio of the maximum chord length of the shape to the maximum chord length of any orthogonal chord.
 |
echocardiography: Cardiac ultrasonography (echocardiography) is a non-invasive technique for imaging the heart and surrounding structures. Generally used to evaluate cardiac chamber size, wall thickness, wall motion, valve configuration and motion and the proximal great vessels.
edge: A sharp variation of the intensity function. Represented by its position, the magnitude of the intensity gradient, and the direction of the maximum intensity variation.
edge based segmentation: Segmentation of an image based on the edges detected.
edge based stereo: A type of feature based stereo where the features used are edges .
edge detection: An image processing operation that computes edge vectors (gradient and orientation) for every point in an image. The first stage of edge based segmentation .
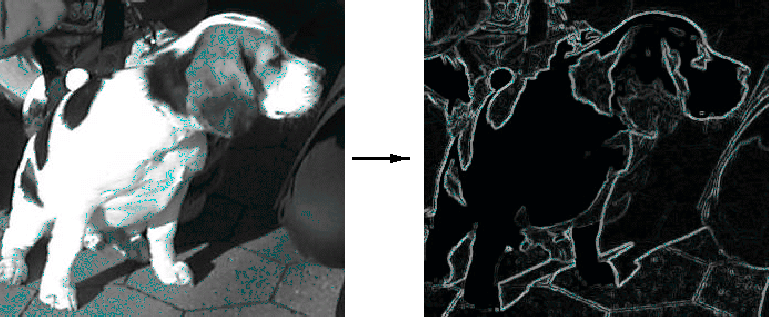 |
edge direction: The direction perpendicular to the normal to an edge , that is, the direction along the edge, parallel to the lines of constant intensity. Alternatively, the normal direction to the edge, i.e. the direction of maximum intensity change (gradient). See also edge detection , edge point .
edge enhancement: An image enhancement operation that makes the gradient of edges steeper. This can be achieved, for example, by adding some multiple of a Laplacian convolved version of the image
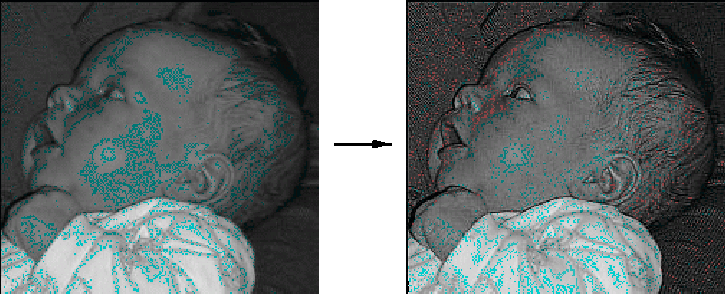 |
edge finding: See edge detection .
edge following: See edge tracking .
edge gradient image: See edge image .
edge grouping: See edge tracking .
edge image: An image where every pixel represents an edge or the edge magnitude .
edge linking: See edge tracking .
edge magnitude: A measure of the contrast at an edge, typically the magnitude of the intensity gradient at the edge point. See also edge detection , edge point .
edge matching: See curve matching .
edge motion: The motion of edges through a sequence of images. See also shape from motion and the aperture problem .
edge orientation: See edge direction .
edge point: 1) A location in an image where some quantity (e.g. intensity) changes rapidly. 2) A location where the gradient is greater than some threshold.
edge preserving smoothing: A smoothing filter that is designed to preserve the edges in the image while reducing image noise . For example see median filter .
 |
edge sharpening: See edge enhancement .
edge tracking: 1) The grouping of edges into chains of significant edges. The second stage of edge based segmentation . Also known as edge following , edge grouping and edge linking . 2) Tracking how the edge moves in a video sequence.
edge type labeling: Classification of edge points or edges into a limited number of types (e.g. fold edge , shadow edge, occluding edge, etc.).
EGI: See extended Gaussian image .
egomotion: The motion of the observer with respect to the observed scene.
egomotion estimation: Determination of the motion of a camera. Generally based on image features corresponding to static objects in the scene. See also structure and motion. A typical image pair where the camera position is to be estimated is:
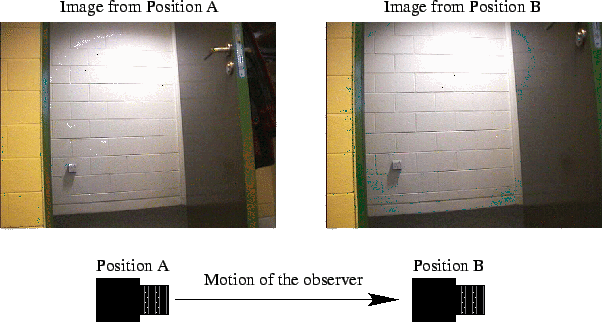 |
eigenface: An eigenvector determined from a matrix
eigenspace based recognition: Recognition based on an eigenspace representation .
eigenspace representation: See principal component representation.
eigenvalue: A scalar
eigenvector: A non-zero vector
eigenvector projection: Projection onto the PCA basis vectors.
electromagnetic spectrum: The entire range of frequencies of electromagnetic waves including X-rays, ultraviolet, visible light, infrared, microwave and radio waves.
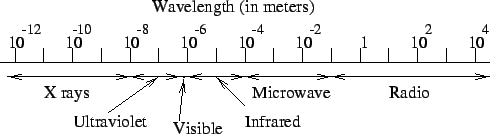 |
ellipse fitting: Fitting of an ellipse model to the boundary of some shape, data points, etc.
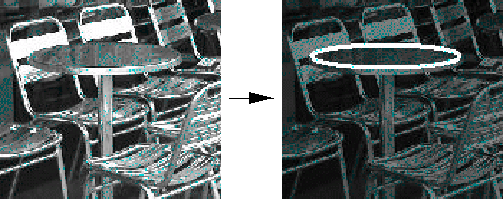 |
ellipsoid: A 3D volume in which all plane cross sections are ellipses or circles. An ellipsoid is the set of points
elliptic snake: An active contour model of an ellipse whose parameters are estimated through energy minimization from an initial position.
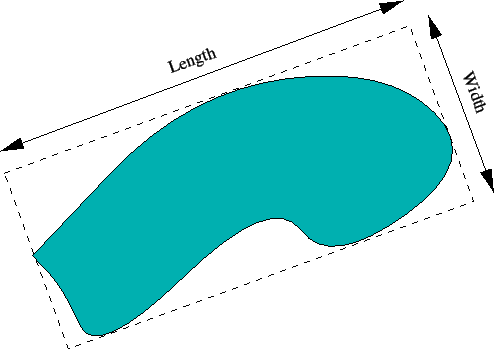
elongatedness: A shape representation that measures how long a shape is with respect to its width (i.e. the ratio of the length of the bounding box to its width), as illustrated below. See also eccentricity.
 |
EM: See expectation maximization .
empirical evaluation: Evaluation of computer vision algorithms in order to characterize their performance by comparing the results of several algorithms on standardized test problems. Careful evaluation is a difficult research problem in its own right.
encoding: Converting a digital signal, represented as a set of values, from one form to another, often to compress the signal. In lossy encoding, information is lost in the process and the decoding algorithm cannot recover it. See also MPEG and JPEG image compression .
endoscope: An instrument for visually examining the interior of various bodily organs. See also fiberscope .
energy minimization: The problem of determining the absolute minimum of a multivariate function representing (by a potential energy-like penalty) the distance of a potential solution from the optimal solution. It is a specialization of the optimization problem. Two popular minimization algorithms in computer vision are the Levenberg-Marquardt and Newton optimization methods.
entropy: 1. Colloquially, the amount of disorder in a system. 2. A measure of the information content of a random variable
![$\displaystyle \sum_{x \in \mathbb{X}} \bigl[-P(x) \log P(x)\bigr] $](CVFIG3/img75.png)
![$\displaystyle \sum_{(x,y) \in \mathbb{X}\times \mathbb{Y}} \bigl[-P(x,y) \log P(x,y)\bigr] $](CVFIG3/img79.png)
 |
epipolar constraint: A geometric constraint reducing the dimensionality of the stereo correspondence problem . For any point in one image, the possible matching points in the other image are constrained to lie on a line known as the epipolar line . This constraint may be described mathematically using the fundamental matrix . See also epipolar geometry .
epipolar correspondence matching: Stereo matching using the epipolar constraint .
epipolar geometry: The geometric relationship between two perspective cameras .
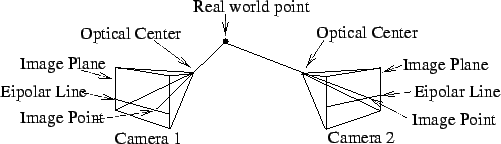 |
epipolar line: The intersection of the epipolar plane with the image plane . See also epipolar constraint .
epipolar plane: The plane defined by any real world scene point together with the optical centers of two cameras.
epipolar plane image (EPI): An image that shows how a particular line from a camera changes as the camera position is changed such that the image line remains on the same epipolar plane. Each line in the EPI is a copy of the relevant line from the camera at a different time. Features that are distant from the camera will remain in the same position in each line, and features that are close to the camera will move from line to line (the closer the feature the further it will move).
 |
epipolar plane image analysis: An approach to determining shape from motion in which epipolar plane images (EPIs) are analyzed. The slope of lines in an EPI is proportional to the distance of the object from the camera, where vertical lines corresponding to features at infinity
epipolar plane motion: See epipolar plane image analysis .
epipolar rectification: The image rectification of stereo images so that the epipolar lines are aligned with the image rows (or columns).
epipolar transfer: The transfer of corresponding epipolar lines in a stereo pair of images, defined by a homography . See also stereo and stereo vision .
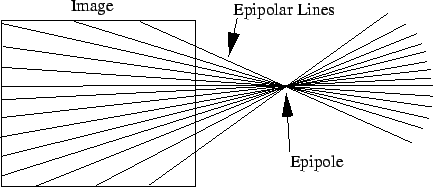
epipole: The point through which all epipolar lines from a camera appear to pass. See also epipolar geometry .
 |
epipole location: The operation of locating the epipoles .
equalization: See histogram equalization .
erode operator: The operation of reducing a binary or gray scale object with respect to the background . This has the effect of removing any isolated object regions and separating any object regions that are only connected by a thin section. Most frequently described as a morphological transformation and is the dual of the dilate operator .
 |
error propagation: 1) The propagation of errors resulting from one computation to the next computation. 2) The estimation of the error (e.g. variance) of a process based on the estimates of the error in the input data and intermediate computations.
essential matrix: In binocular stereo , a matrix
Euclidean distance: The geometric distance between two points
Euclidean reconstruction: 3D reconstruction of a scene using a Euclidean frame of reference, as opposed to an affine reconstruction or projective reconstruction . The most complete reconstruction achievable. For example, using stereo vision .
Euclidean space: A representation of the space of all
Euclidean transformation: A transformation that operates in Euclidean space (i.e. maintaining the Euclidean spatial arrangements). Examples include rotation and translation. Often applied to homogeneous coordinates.
Euler angle: The Euler angles (
Euler-Lagrange: The Euler-Lagrange equations are the basic equations in the calculus of variations , a branch of calculus concerned with maxima and minima of definite integrals. They occur, for instance, in Lagrangian mechanics and have been used in computer vision for a variety of optimizations, including for surface interpolation. See also variational approach and variational problem .
Euler number: The number of contiguous parts (regions) less the number of holes. Also known as the genus.
even field: The first of the two fields in an interlaced video signal.
even function: A function where
event analysis: See event understanding .
event detection: Analysis of a sequence of images to detect activities in the scene.
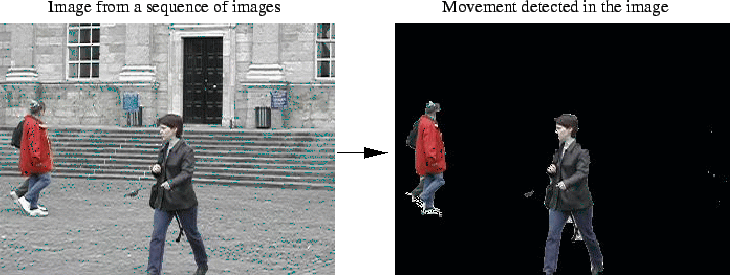 |
event understanding: Recognition of an event (such as a person walking) in a sequence of images. Based on the data provided by event detection .
exhaustive matching: Matching where all possibilities are considered. As an alternative see hypothesize and verify .
expectation maximization (EM): A method of finding a maximum likelihood estimate of some parameters based on a sample data set. This method works well even when there are missing values.
expectation value: The mean value of a function (i.e. the average expected value). If
expert system: A system that uses available knowledge and heuristics to solve problems. See also knowledge based vision .
exponential smoothing: A method for predicting a data value (
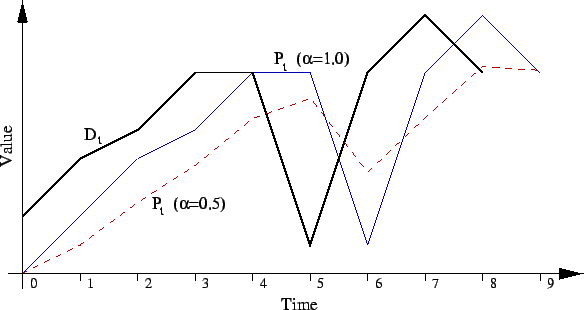 |
exponential transformation: See pixel exponential operator.
expression understanding: See facial expression analysis.
extended Gaussian image (EGI): Use of a Gaussian sphere for histogramming surface normals. Each surface normal is considered from the center of the sphere and the value associated with the surface patch with which it intersects is incremented.
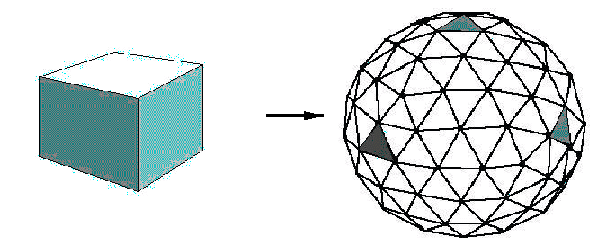 |
extended light source: A light source that has a significant size relative to the scene, i.e. is not approximated well by a point light source . In other words this type of light source has a diameter and hence can produce fuzzy shadows. Contrast with: point light sources .
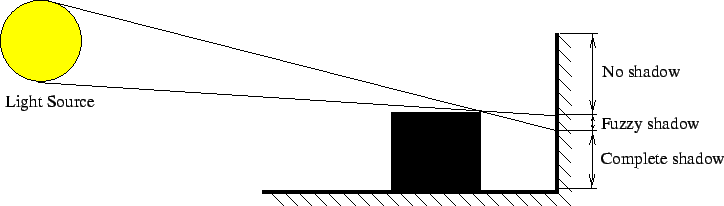 |
exterior orientation: The position of a camera in a global coordinate system. That which is determined by an absolute orientation calculation.
external energy (or force): A measure of fit between the image data and an active shape model that is part of the model's deformation energy . This measure is used to deform the model to the image data.
extremal point: Points that lie on the boundary of the smallest convex region enclosing a set of points (i.e. that lie on the convex hull ).
extrinsic parameters: See exterior orientation .
eye location: The task of finding eyes in images of faces. Approaches include blink detection, face feature detection , etc.
eye tracking: Tracking the position of the eyes in a face image sequence. Also, tracking the gaze direction .
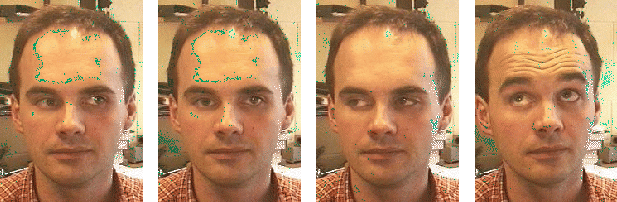 |