Real-time Fire and Flame Detection in Video*
B. Uğur Töreyin, Yiğithan Dedeoğlu,
Uğur Güdükbay, A. Enis Çetin
Bilkent University, Ankara, Turkey
Conventional
point smoke and fire detectors are widely used in buildings. They typically
detect the presence of certain particles generated by smoke and fire by
ionization or photometry. Alarm is not issued unless particles reach the
sensors to activate them. Therefore, they cannot be used in open spaces and
large covered areas. Video based fire detection systems can be useful to detect
fire in large auditoriums, tunnels, atriums, etc. The strength of using video
in fire detection makes it possible to serve large and open spaces. In
addition, closed circuit television (CCTV) surveillance systems are currently
installed in various public places monitoring indoors and outdoors. Such
systems may gain an early fire detection capability with the use of a fire
detection software processing the outputs of CCTV cameras in real time.
Our aim is to
detect flame, fire and smoke
in real-time by processing the video data generated by an ordinary camera
monitoring a scene.
Detection Algorithm
The proposed
video-based fire detection algorithm consists of four steps:
1. Moving region detection:
Moving pixels or
regions in the current frame of a video are determined by using the hybrid
background estimation method developed by Collins et al.
(1999).
2.
Detection of fire-colored pixels
Color values of
moving pixels are compared with a pre-determined color distribution, which
represents possible fire colors in video in RGB color space.
3. Temporal wavelet analysis
It is observed
that turbulent flames flicker with a characteristic frequency of around 10 Hz
independent of the burning material and the burner (Albers
and Agrawal, 1999; Chamberlin and Rose, 1965). To capture 10 Hz
flicker, the
video should capture at least 20 fps. If the video is available at a lower
capture rate, aliasing occurs but flicker due to flames can still be observed
in the video.
Each pixel’s red
channel value, xn[k,l], is fed to a two stage-filter bank (Fig.1).
This filter bank is composed of half-band high-pass and low-pass filters with
filter coefficients {-0.25, 0.5, -0.25} and {0.25, 0.5, 0.25}, respectively.
The filter bank produces wavelet subsignals dn[k,l] and en[k,l].
If there is high frequency activity at pixel location [k,l], high-band
subsignals d and e get non-zero values (Fig.2). However, in a stationary pixel,
the values of these two subsignals should be equal to zero or very close to
zero because of high-pass filters used in subband analysis (Fig.3).
Fig.1. A two-stage filter bank. HPF and LPF represent half-band high-pass and
low-pass filters, with filter coefficients {-0.25, 0.5, -0.25} and {0.25, 0.5,
0.25}, respectively. This filter bank is used for wavelet analysis.
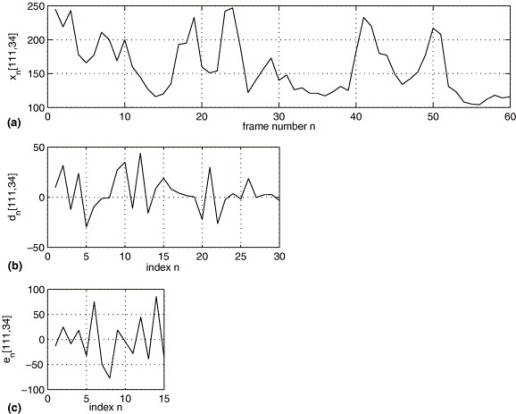
Fig.2. (a) Temporal variation of image pixels xn[111, 34] in time.
The pixel at [111, 34] is part of a flame for image frames xn, n=1,
2, 3, 19, 23, 24, 41 and 50. It becomes part of the background for n = 12,...,
17, 20, 21, 26, 27, 31,..., 39, 45, 52,..., and 60. Wavelet domain subsignals
(b) dn and (c) en reveal the fluctuations of the pixel at
[111, 34].
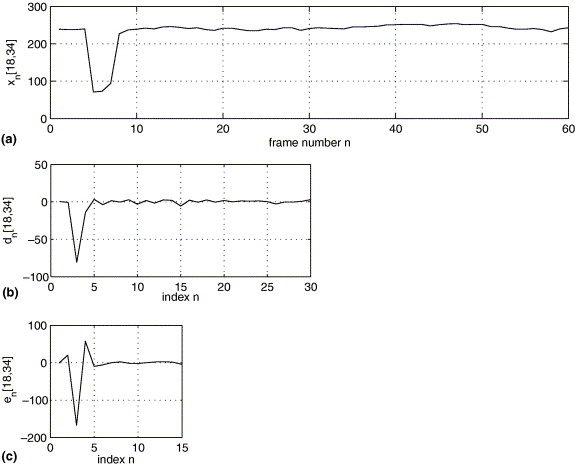
Fig.3. (a) Temporal history of the pixel [18, 34] in time. It is part of a
fire-colored object for n = 4, 5, 6, 7, and 8, and it becomes part of the
background afterwards. Corresponding subsignals (b) dn and (c) en
exhibit stationary behavior for n>8.
4. Spatial wavelet analysis
In an ordinary fire-colored object there will be
little spatial variations in the moving region as shown in Fig.4(a). On the
other hand, there will be significant spatial variations in a fire region as
shown in Fig.5(a). The spatial wavelet analysis of a rectangular frame
containing the pixels of fire-colored moving regions is performed. The images
in Figs.4(b) and 5(b) are obtained after a single stage two-dimensional wavelet
transform that is implemented in a separable manner using the same filters
explained in the previous section. Absolute values of low-high, high-low and
high-high wavelet subimages are added to obtain these images. A decision
parameter is defined for this step, according to the energy of the wavelet
subimages.
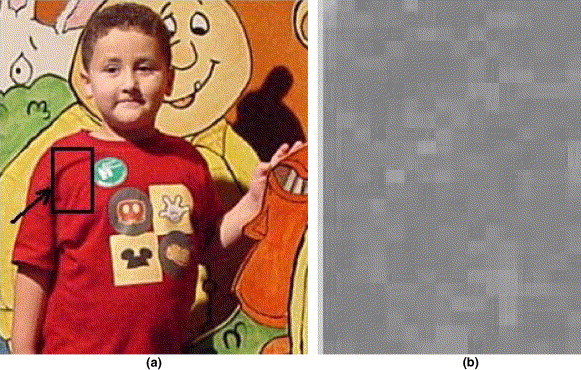
Fig.4. (a) A child with a fire-colored t-shirt, and (b) the
absolute sum of spatial wavelet transform coefficients, |xlh[k,l]| +
|xhl[k,l]|+|xhh[k,l]|, of the region bounded by the
indicated rectangle.
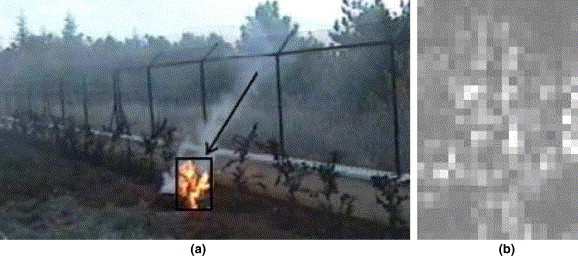
Fig.5. (a) Fire, and (b) the absolute sum of spatial wavelet
transform coefficients, |xlh[k,l]| + |xhl[k,l]| + |xhh[k,l]|,
of the region bounded by the indicated rectangle.
References
- R. T.
Collins, A. J. Lipton, and T. Kanade, ``A System for Video
Surveillance and Monitoring,'' in the Proc. of American Nuclear Society
(ANS) Eighth International Topical Meeting on Robotics and Remote Systems,
Pittsburgh, PA, 1999.
- B. W.
Albers and A. K. Agrawal, ``Schlieren Analysis of an Oscillating
Gas-jet Diffusion,'' Combustion and Flame, Vol. 119, pp. 84-94, 1999.
- D. S.
Chamberlin and A. Rose, The First Symposium International on
Combustion, The Combustion Institute, Pittsburgh, pp. 27-32, 1965.