face analysis
face authentication
face detection
face feature detection
face identification
face indexing
face modelling
face recognition
face tracking
face verification
facet model based extraction
facial animation
facial expression analysis
factorization
false alarm
false negative
false positive
fast Fourier transform
fast marching method
feature
feature based optical flow estimation
feature based stereo
feature based tracking
feature contrast
feature detection
feature extraction
feature location
feature matching
feature orientation
feature point
feature point correspondence
feature point tracking
feature selection
feature similarity
feature space
feature stabilization
feature tracking
feature vector
feedback
FERET
Feret's diameter
FFT
fiber optics
fiberscope
fiducial point
figure of merit
figure-ground separation
filter
filter ringing
filtering
fingerprint database indexing
fingerprint identification
fingerprint indexing
finite element model
finite impulse response filter
FIR
Firewire
first derivative filter
first fundamental form
Fisher linear discriminant
fisheye lens
flat field
flexible template
FLIR
flow field
flow histogram
flow vector field
fluorescence
fMRI
FOA
FOC
focal length
focal plane
focal point
focal surface
focus
focus control
focus following
focus invariant imaging
focus of attention
focus of contraction
focus of expansion
FOE
fold edge
foreground
foreshortening
form factor
Förstner operator
forward looking radar
Fourier domain convolution
Fourier domain inspection
Fourier image processing
Fourier matched filter object recognition
Fourier shape descriptor
Fourier slice theorem
Fourier space
Fourier space smoothing
Fourier transform
Fourier-Bessel transform
fovea
foveal image
foveation
fractal image compression
fractal measure/dimension
fractal representation
fractal surface
fractal texture
frame
frame buffer
frame grabber
frame of reference
frame store
freeform surface
Freeman code
Frenet frame
frequency domain filter
frequency spectrum
front lighting
frontal
full primal sketch
function based model
function based recognition
functional optimization
functional representation
fundamental form
fundamental matrix
fusion
fuzzy logic
fuzzy morphology
fuzzy reasoning
fuzzy set
face analysis: A general term covering the analysis of face images and models. Often used to refer to facial expression analysis .
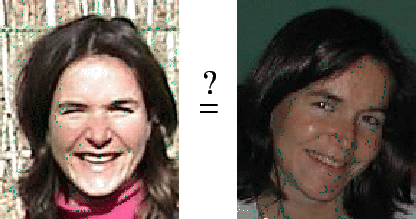
face authentication: Verification that (the image of) a face corresponds to a particular individual. This differs from the face recognition in that here only the model of a single person is considered.
 |
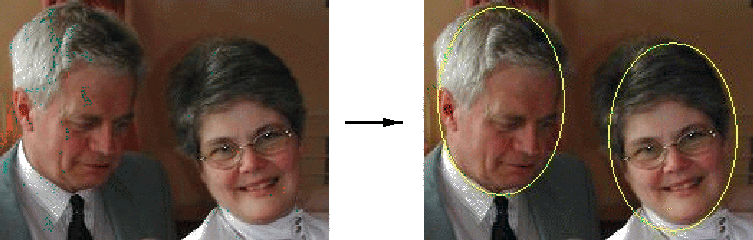
face detection: Identification of faces within an image or series of images. This often involved a combination of human motion analysis and skin color analysis .
 |
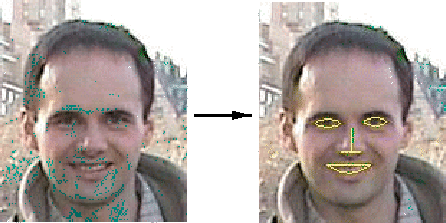
face feature detection: The location of features (such as eyes, nose, mouth) from a human face. Normally performed after face detection although it can be used as part of face detection .
 |
face identification: See face recognition .
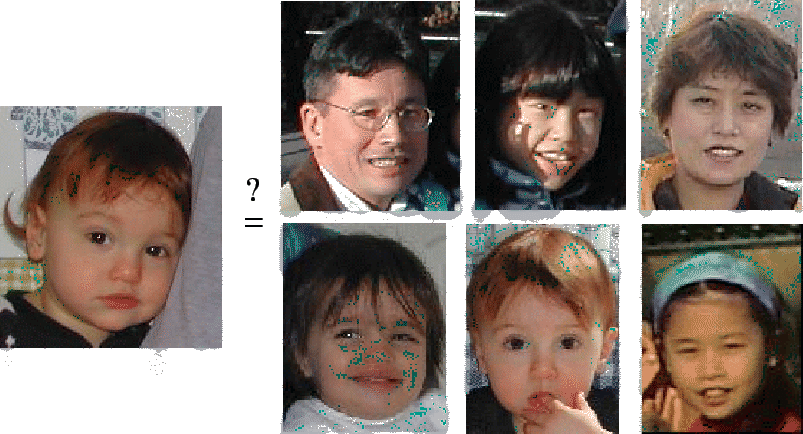
face indexing: Indexing from a database of known faces as a precursor to face recognition .
face modeling: Representing a face using some type of model typically derived from an image (or images). These models are used in face authentication , face recognition, etc.
face recognition: The task of recognizing a face from an image as an instance of a person recorded in a database of faces.
 |
face tracking: Tracking of a face in a sequence of images. Often used as part of a human-computer interface.
face verification: See face authentication .
facet model based extraction: The extraction of a model based on facets (small simple surfaces; e.g. see planar facet model ) from range data . See also planar patch extraction .
facial animation: The way in which facial expressions change. See also face feature detection .
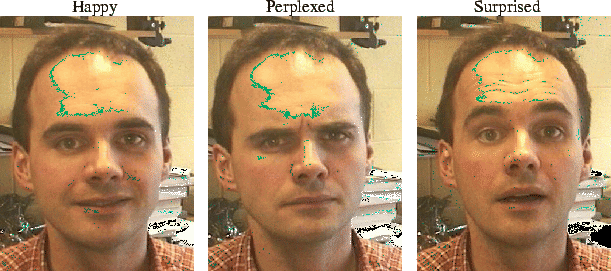
facial expression analysis: Study or identification of the facial expression(s) of a person from an image or sequence of images.
 |
factorization: See motion factorization .
false alarm: See false positive .
false negative: A binary classifier
false positive: A binary classifier
fast Fourier transform (FFT): A version of the Fourier transform for discrete samples that is significantly more efficient (order
fast marching method: A type of level set method in which the search can move in only one direction (hence making it faster).
feature: 1) A distinctive part of something (e.g. the nose and eyes are distinctive features of the face), or an attribute derived from an object/shape (e.g. circularity ). See also image feature . 2) A numerical property (possibly combined with others to form a feature vector ) and generally used in a classifier .
feature based optical flow estimation: Calculation of optical flow in a sequence of images from image features .
feature based stereo: A solution to the stereo correspondence problem in which image features are compared from the two images. The main alternative approach is correlation based stereo .
feature based tracking: Tracking the motion of image features through a sequence.
feature contrast: The difference between two features. This can be measured in many domains (e.g. intensity, orientation, etc.).
feature detection: Identification of given features in an image (or model). For example see corner detection .
feature extraction: See feature detection .
feature location: See feature detection .
feature matching: Matching of image features in several images of the same object (for instance, feature based stereo ), or of features from an unknown object with features from known objects (feature based recognition).
feature orientation: The orientation of an image feature with respect to the image frame of reference.
feature point: The image location at which a particular feature is found.
feature point correspondence: Matching feature points in two or more images . The assumption is that the feature points are the image of the same scene point. Having the correspondence allows the estimation of the depth from binocular stereo , fundamental matrix , homography or trifocal tensor in the case of 3D scene structure recovery or of the 3D target motion in the case of target tracking.
feature point tracking: Tracking of individual image features in a sequence of images.
feature selection: Selection of suitable features (properties) for a specific task, for example, classification. Typically features should be independent, detectable, discriminatory and reliable.
feature similarity: How much two features resemble each other. Measures of feature similarity are required for feature based stereo , feature based tracking , feature matching , etc.
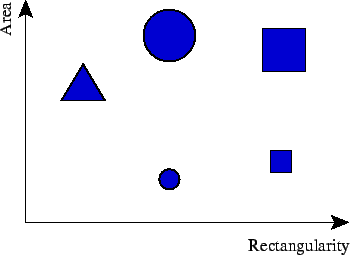
feature space: The dimensions of a feature space are the feature (property) values of a given problem. An object or shape is mapped to feature space by computing the values of the set of features defining the space, typically for recognition and classification. In the example below, different shapes are mapped to a 2D feature space defined by area and rectangularity.
 |
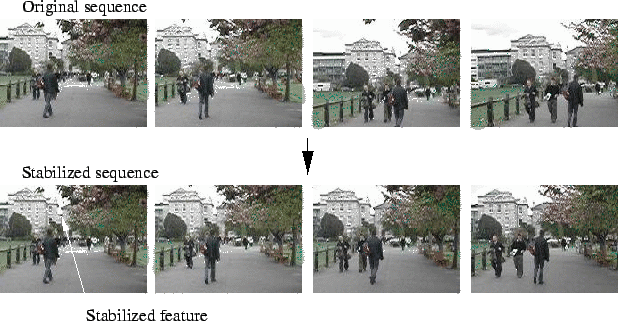
feature stabilization: A technique for stabilizing the position of an image feature in an image sequence so that it remains in a particular position on a display (allowing/causing the rest of the image to move relative to that feature).
 |
feature tracking: See feature based tracking .
feature vector: A vector formed by the values of a number of image features (properties), typically all associated with the same object or image.
feedback: The use of outputs from a system to control the system's actions.
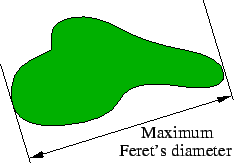
Feret's diameter: The distance between two parallel lines at the extremities of some shape that are tangential to the boundary of the shape. Maximum, minimum and mean values of Feret's diameter are often used (where every possible pair of parallel tangent lines is considered).
 |
FERET: A standard database of face images with a defined experimental protocol for the testing and comparison of face recognition algorithms.
FFT: See fast Fourier transform .
fiber optics: A medium for transmitting light that consists of very thin glass or plastic fibers. It can be used to provide much higher bandwidth for signals encoded as patterns of light pulses. Alternately, it can be used to transmit images directly through rigidly connected bundles of fibers, so as to see around corners, past obstacles, etc.
fiberscope: A flexible fiber optic instrument allowing parts of an object to be viewed that would normally be inaccessible. Most often used in medical examinations.
fiducial point: A reference point for a given algorithm, e.g. a fixed, known, easily detectable pattern for a calibration algorithm.
figure-ground separation: The segmentation of the area of the image representing the object of interest (the figure) from the remainder of the image (the background).
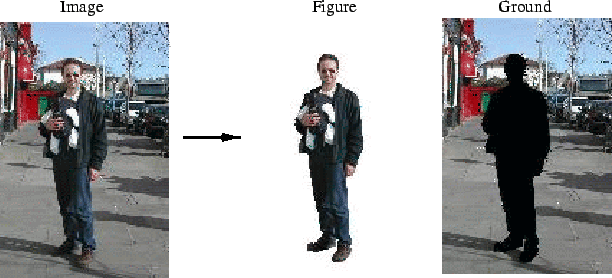 |
figure of merit: Any scalar that is used to characterize the performance of an algorithm.
filter: In general, any algorithm that transforms a signal into another. For instance, bandpass filters remove/reduce the parts of an input signal outside a given frequency interval; gradient filters allow only image gradients to pass through; smoothing filters attenuate high frequencies.
filter ringing: A type of distortion caused by the application of a steep recursive filter. Normally this term applies to electronic filters in which certain components (e.g. capacitors and inductors) can store energy and later release it, but there are also digital equivalents to this effect.
filtering: Application of a filter .
fingerprint database indexing: Indexing into a database of fingerprints using a number of features derived from the fingerprints. This allows a smaller number of fingerprints to be considered when attempting fingerprint identification within the database.
fingerprint identification: Identification of an individual through comparison of an unknown fingerprint (or fingerprints) with previously known fingerprints.
fingerprint indexing: See fingerprint database indexing .
finite element model: A class of numerical methods for solving differential problems. Another relevant class is finite difference methods.
finite impulse response filter (FIR): A filter that produces an output value (
FIR: See finite impulse response filter .
Firewire (IEEE 1394): A serial digital bus system supporting 400 Mbits per second. Power, control and data signals are carried in a single cable. The bus system makes it possible to address up to 64 cameras from a single interface card and multiple computers can acquire images from the same camera simultaneously.
first derivative filter: See gradient filter .
first fundamental form: See surface curvature.
Fisher linear discriminant (FLD): A classification method that maps high dimensional data into a single dimension in such a way as to maximize class separability.
fisheye lens: See wide angle lens .
flat field: 1) An object of uniform color, used for photometric calibration of optical systems. 2) A camera system is flat field correct if the gray scale output at each pixel is the same for a given light input.
flexible template: A model of a shape in which the relative position of points is not fixed (e.g. defined in probabilistic form). This approach allows for variations in the appearance of the shape.
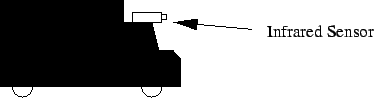
FLIR: Forward Looking Infrared. An infrared system mounted on a vehicle looking ahead along the direction of travel.
 |
flow field: See optical flow field .
flow histogram: A histogram of the optical flow in an image sequence. This can be used, for example, to provide a qualitative description of the motion of the observer.
flow vector field: Optical flow is described by a vector (magnitude and orientation) for each image point. Hence a flow vector field is the same as an optical flow field .
fluorescence: The emission of visible light by a substance caused by the absorption of some other (possibly invisible) electromagnetic wavelength. This property is sometimes used in industrial machine vision .
fMRI: Functional Magnetic Resonance Imaging, or fMRI, is a technique for identifying which parts of the brain are activated by different types of physical stimulation, e.g. visual or acoustic stimuli. A MRI scanner is set up to register the increased blood flow to the activated areas of the brain on Functional MRI scans. See also nuclear magnetic resonance .
FOA: See focus of attention .
FOC: See focus of contraction .
focal length: 1) The distance between the camera lens and the focal plane . 2) The distance from a lens at which an object viewed at infinity would be in focus.
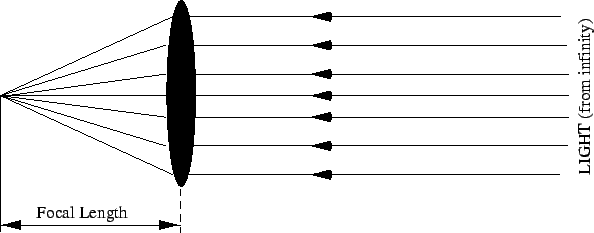 |
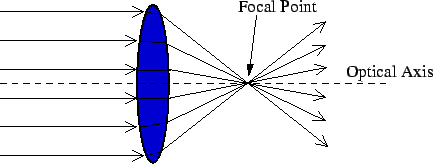
focal point: The point on the optical axis of a lens where light rays from an object at infinity (also placed on the optical axis) converge.
 |
focal plane: The plane on which an image is focused by a lens system. Generally this consists of an array of photosensitive elements. See also image plane .
focal surface: A term most frequently used when a concave mirror is used to focus an image (e.g. in a reflector telescope). The focal surface in this case is the surface of the mirror.
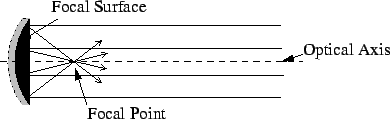 |
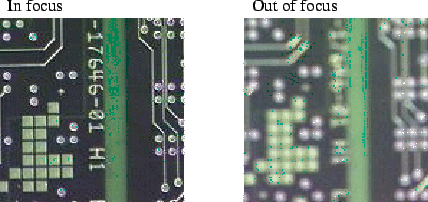
focus: To focus a camera is to arrange for the focal points of various image features to converge on the focal plane . An image is considered to be in focus if the main subject of interest is in focus. Note that focus (or lack of focus) can be used to derive useful information (e.g. see depth from focus ).
 |
focus control: The control of the focus of a lens system usually by moving the lens along the optical axis or by adjusting the focal length . See also autofocus .
focus following: A technique for slowly changing the focus of a camera as an object of interest moves. See also depth from focus .
focus invariant imaging: Imaging systems that are designed to be invariant to focus . Such systems have large depths of field.
focus of attention (FOA): The feature or object or area to which the attention of a visual system is directed.
focus of contraction (FOC): The point of convergence of the optical flow vectors for a translating camera. The component of the translation along the optical axis must be nonzero. Compare focus of expansion .
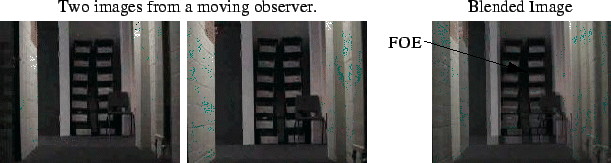
focus of expansion (FOE): The point from which all optical flow vectors appear to emanate in a static scene where the observer is moving. For example if a camera system was moving directly forwards along the optical axis then the optical flow vectors would all emanate from the principal point (usually near the center of the image).
 |
FOE: See focus of expansion .
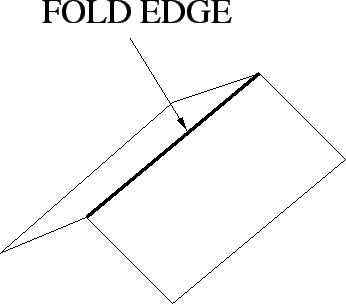
fold edge: A surface orientation discontinuity. An edge where two locally planar surfaces meet. The figure below shows a fold edge.
 |
foreground: In computer vision, generally used in the context of object recognition. The area of the scene or image in which the object of interest lies. See figure-ground separation .
foreshortening: A typical perspective effect whereby distant objects appear smaller than closer ones.
form factor: The physical size or arrangement of an object. This term is frequently used with reference to computer boards.
Förstner operator: A feature detector used for corner detection as well as other edge features.
forward looking radar: A radar system mounted on a vehicle looking ahead along the direction of travel. See also side looking radar .
Fourier-Bessel transform: See Hankel transform .
Fourier domain convolution: Convolution in the Fourier domain involves simply multiplication of the Fourier transformed image by the Fourier transformed filter. For very large filters this operation is much more efficient than convolution in the original domain.
Fourier domain inspection: Identification of defects based on features in the Fourier transform of an image.
Fourier image processing: Image processing in the Fourier domain (i.e. processing images that have been transformed using the Fourier transform ).
Fourier matched filter object recognition: Object recognition in which correlation is determined using a matched filter that is the conjugate of the Fourier transform of the object being located.
Fourier shape descriptor: A boundary representation of a shape in terms of the coefficients of a Fourier transformation.
Fourier slice theorem: A slice at an angle
Fourier space: The frequency domain space in which an image (or other signal) is represented after application of the Fourier transform.
Fourier space smoothing: Application of a smoothing filter (e.g. to remove high-frequency noise) in a Fourier transformed image.
Fourier transform: A transformation that allows a signal to be considered in the frequency domain as a sum of sine and cosine waves or equivalently as a sum of exponentials. For a two dimensional image
fovea: The high-resolution central region of the human retina. The analogous region in an artificial sensor that emulates the retinal arrangement of photoreceptor, for example a log-polar sensor.
foveal image: An image in which the sampled pattern is inspired by the arrangement of the human fovea, i.e. sampling is most dense in the image center and gets progressively sparser towards the periphery of the image.
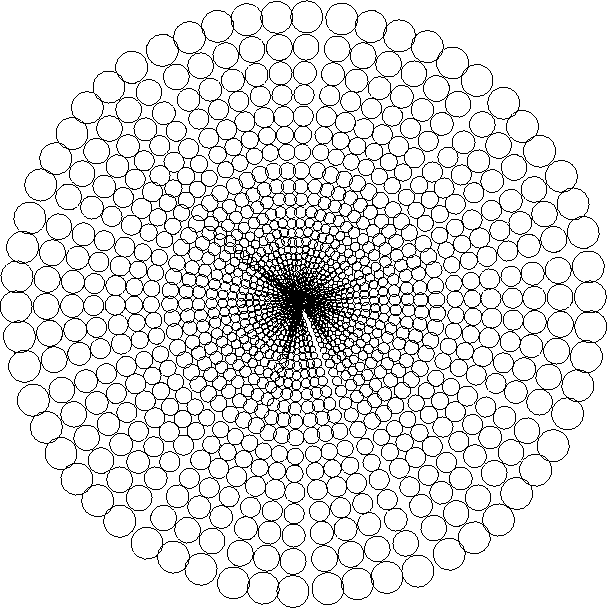 |
foveation: 1) The process of creating a foveal image . 2) Directing the camera optical axis to a given direction.
fractal image compression: An image compression method based on exploiting self-similarity at different scales.
fractal measure/dimension: A measure of the roughness of a shape. Consider a curve whose length (
fractal representation: A representation based on self-similarity. For example a fractal representation of an image could be based on similarity of blocks of pixels.
fractal surface: A surface model that is defined progressively using fractals (i.e. the surface displays self-similarity at different scales).
fractal texture: A texture representation based on self-similarity between scales.
frame: 1) A complete standard television video image consisting of both the even and odd video fields . 2) A knowledge representation technique suitable for recording a related set of facts, rules of inference, preconditions, etc.
frame buffer: A device that stores a video frame for access, display and processing by a computer. For example such devices are used to store the frame from which a video display is refreshed. See also frame store .
frame grabber: See frame store .
frame of reference: A coordinate system defined with respect to some object, the camera or with respect to the real world.
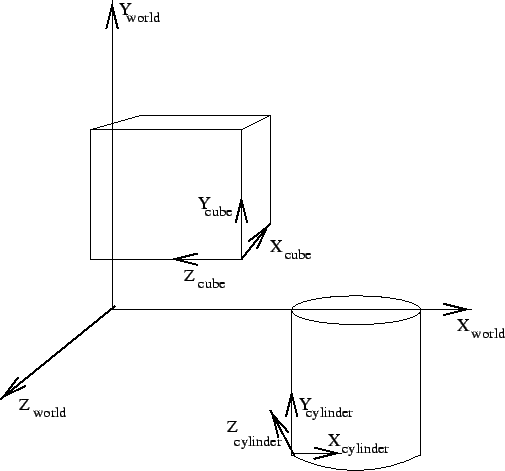 |
frame store: An electronic device for recording a frame from an imaging system. Typically such devices are used as interfaces between CCIR cameras and computers.
freeform surface: A surface that does not follow any particular mathematical form; for example, the folds of a piece of fabric, as shown below.
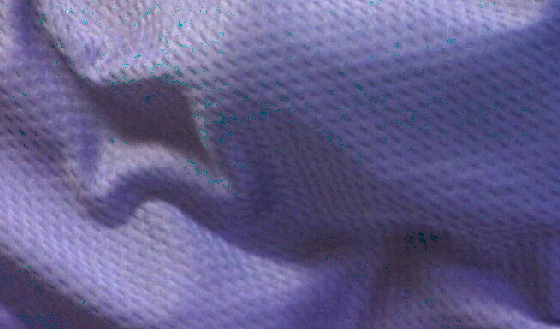 |
Freeman code: A type of chain code in which a contour is represented by coordinates for the first point followed by a series of direction codes (typically 0 through 7). In the following figure we show the Freeman codes relative to the center point on the left and an example of the codes derived from a chain of points on the right.
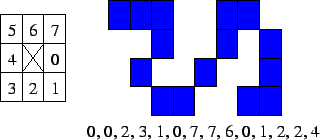 |
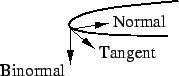
Frenet frame: A triplet of mutually orthogonal unit vectors (the normal , the tangent and the binormal/bitangent ) describing a point on a curve.
 |
frequency domain filter: A filter defined by its action in the Fourier space. See high pass filter and low pass filter .
frequency spectrum: The range of (electromagnetic) frequencies.
front lighting: A general term covering methods of lighting a scene where the lights are on the same side of the object as the camera. As an alternative consider backlighting . For example,
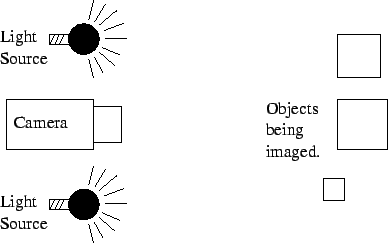 |
frontal: Frontal presentation of a planar surface is one in which the plane is parallel to the image plane .
full primal sketch: A representation described as part of Marr's theory of vision, that is made up of the raw primal sketch primitives together with grouping information. The sketch contains described image structures that could correspond with scene structures (e.g. image regions with scene surfaces).
function based model: An object representation based on the object functionality (e.g. an object's purpose or the way in which an object moves and interacts with other objects) rather than its geometric properties.
function based recognition: Object recognition based on object functionality rather than geometric properties. See also function based model .
functional optimization: An analytical technique for optimizing (maximizing or minimizing) complex functions of continuous variables.
functional representation: See function based model .
fundamental form: A metric that useful in determining local properties of surfaces. See also first fundamental form and second fundamental form .
fundamental matrix: A bilinear relationship between corresponding points (
fusion: Integration of data from multiple sources into a single representation.
fuzzy logic: A form of logic that allows a range of possibilities between true and false (i.e. a degree of truth).
fuzzy morphology: A type of mathematical morphology that is based on fuzzy logic rather than the more conventional Boolean logic.
fuzzy set: A grouping of data (into a set) where each item in the set has an associated grade/likelihood of membership in the set.
fuzzy reasoning: See fuzzy logic