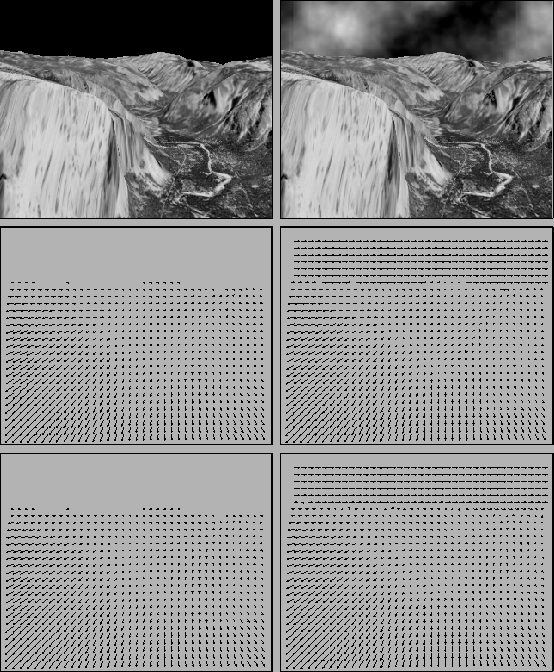
For evaluation of the method we use the famous Yosemite sequence
with and without cloudy sky. The original version with cloudy sky was
created by Lynn Quam and is available at ftp://ftp.csd.uwo.ca/pub/vision.
It combines both divergent and translational motion. The version without clouds
is available at http://www.cs.brown.edu/people/black/images.html.
The flow fields obtained with the method are presented in Fig.1
They match the ground truth very well. Not only the discontinuity between
the two types of motion is preserved, also the translational motion of the
clouds is estimated accurately. The reason for this behaviour lies in the model
assumptions, that are clearly stated in the energy functional: While the
choice of the smoothness term allows discontinuities, the gradient constancy
assumption is able to handle brightness changes - like in the area of the
clouds.
 |
Noise
Because of the presence of second order image derivatives in the Euler-Lagrange
equations, the influence of noise on the performance of the method is tested in
another experiment. We added Gaussian noise of mean zero and different standard
deviations to both sequences. The obtained results are presented in
Tab.1. They show that the approach even yields excellent
flow estimates when severe noise is present.
|
Parameter robustness
In a third experiment the robustness of the free parameters is tested:
the weight ![]() between the grey value and the gradient constancy
assumption, and the smoothness parameter
between the grey value and the gradient constancy
assumption, and the smoothness parameter ![]() . Often an image sequence
is preprocessed by Gaussian convolution with standard deviation
. Often an image sequence
is preprocessed by Gaussian convolution with standard deviation ![]() [4]. In this case,
[4]. In this case, ![]() can be regarded as a third parameter.
Results are computed with parameter settings that deviate by a factor 2
in both directions from the optimum setting. The outcome listed in Tab.
2 shows that the method is also very robust under parameter
variations.
can be regarded as a third parameter.
Results are computed with parameter settings that deviate by a factor 2
in both directions from the optimum setting. The outcome listed in Tab.
2 shows that the method is also very robust under parameter
variations.
|
Convergence behaviour
The implicit minimisation scheme presented here is also reasonably fast,
especially if the reduction factor ![]() is lowered or if the iterations
are stopped before full convergence. The convergence behaviour and
computation times can be found in Tab. 3. Computations have
been performed on a 3.06 GHz Intel Pentium 4 processor executing C/C++
code.
is lowered or if the iterations
are stopped before full convergence. The convergence behaviour and
computation times can be found in Tab. 3. Computations have
been performed on a 3.06 GHz Intel Pentium 4 processor executing C/C++
code.
|
2D - spatial method
3D - spatio-temporal method
|
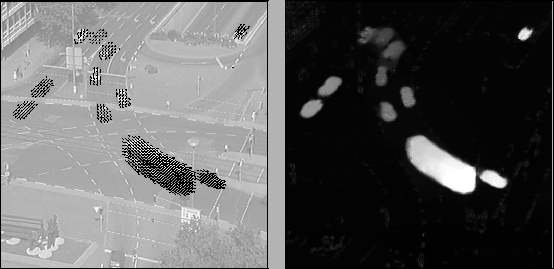
For evaluating the performance of the method with real-world image
data, the Ettlinger Tor traffic sequence by Nagel is used.
This sequence consists of 50 frames of size
![]() . It
is available at http://i21www.ira.uka.de/image_sequences/.
In Fig. 2 the computed flow field and its magnitude are shown.
The estimation gives very realistic results, and the algorithm hardly suffers
from interlacing artifacts that are present in all frames. Moreover, the
flow boundaries are rather sharp and can be used directly for segmentation
purposes by applying a simple thresholding step.
. It
is available at http://i21www.ira.uka.de/image_sequences/.
In Fig. 2 the computed flow field and its magnitude are shown.
The estimation gives very realistic results, and the algorithm hardly suffers
from interlacing artifacts that are present in all frames. Moreover, the
flow boundaries are rather sharp and can be used directly for segmentation
purposes by applying a simple thresholding step.
The MPEG-files show the original sequence and the computed flow field in
a colour code that is overlaid above the images. The hue expresses the
direction of motion and the intensity of the colour shows the magnitude of
the flow vector.
 |
| Original sequence (MPEG,1MB) | Computed flow (MPEG,2.3MB) | |||
| Small version (MPEG,0.5MB) | Small version (MPEG,1.2MB) |