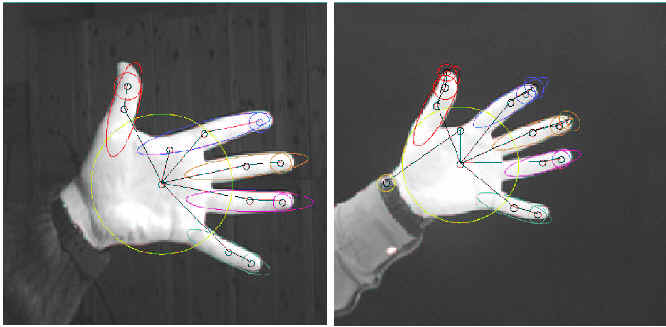
As an illustration of our approach, let's first return to the example
shown in Figure 1, where we observed the need for
many-to-many matching. The results of applying our method to the
these two images is shown in Figure 5, in
which many-to-many feature correspondences have been colored the same.
For example, a set of blobs and ridges describing a finger in the left
image is mapped to a set of blobs in ridges on the corresponding
finger in the right image.
Figure 5:
Applying our algorithm to the images in Figure 1.
Many-to-many feature correspondences have been colored the same.
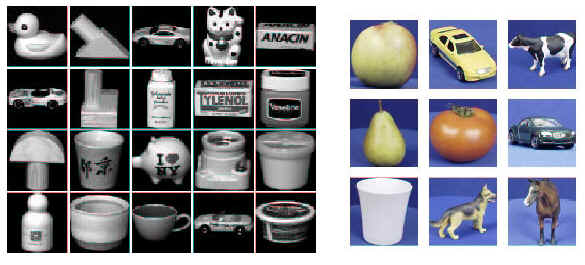
To provide a more comprehensive evaluation, we tested our framework on
two separate image libraries, the Columbia University COIL-20 (20
objects, 72 views per object) and the ETH Zurich ETH-80 (8 categories,
10 exemplars per category, 41 views per exemplar). For each view, we compute a multi-scale
blob decomposition, using the algorithm described in
[19]. Next, we compute the tree metric corresponding to the
complete edge-weighted graph defined on the regions of the scale-space
decomposition of the view. The edge weights are computed as a
function of the distances between the centroids of the regions in the
scale-space representation. Finally, each tree is embedded into a
normed space of prescribed dimension. This procedure results in two
databases of weighted point sets, each point set representing an
embedded graph.
Figure 6:
Views of sample objects from the Columbia University Image Library
(COIL-20) and the ETH Zurich (ETH-80) Image Set.
For the COIL-20 database, we begin by removing 36 (of the 72)
representative views of each object (every other view), and use these
removed views as queries to the remaining view database (the other 36
views for each of the 20 objects). We then compute the distance
between each ``query'' view and each of the remaining database views,
using our proposed matching algorithm. Ideally, for any given query
view of object , , the matching algorithm should
return either or as the closest view. We will
classify this as a correct matching. Based on the overall matching
statistics, we observe that in all but of the experiments, the
closest match selected by our algorithm was a neighboring view.
Moreover, among the mismatches, the closest view belonged to the same
object in of the cases. In comparison to the many-to-many
matching algorithm based on PCA embedding [7] for a similar
setup, the new procedure showed an improvement of 5.5%.
It should be pointed out that these results can be considered worst
case for two reasons. First, the original 72 views per object
sampling resolution was tuned for an eigenimage approach. Given the
high similarity among neighboring views, it could be argued that our
matching criterion is overly harsh, and that perhaps a measure of
``viewpoint distance'', i.e., ``how many views away was the closest
match'' would be less severe. In any case, we anticipate that with
fewer samples per object, neighboring views would be more dissimilar,
and our matching results would improve. Second, and perhaps more
importantly, many of the objects are symmetric, and if a query
neighbor has an identical view elsewhere on the object, that view
might be chosen (with equal distance) and scored as an error. Many of
the objects in the database are rotationally symmetric, yielding
identical views from each viewpoint.
For the ETH-80 database, we chose a subset of 32 objects (4 from each
of the 8 categories) with full sampling (41 views) per object. For
each object, we removed each of its 41 views from the database, one
view at a time, and used the removed view as a query to the remaining
view database. We then computed the distance between each query view
and each of the remaining database views. The criteria for correct
classification was similar to the COIL-20 experiment. Our experiments
showed that in all but of the experiments, the closest match
selected by our algorithm was a neighboring view. Among the
mismatches, the closest view belonged to the same object in
of the cases, and the same category in of the cases. Again,
these results can be considered worst case for the same reasons
discussed above for the COIL-20 experiment.
Both the embedding and matching procedures can accommodate local
perturbation, due to noise and occlusion, because path partitions
provide locality. If a portion of the graph is corrupted, the
projections of unperturbed nodes will not be affected. Moreover, the
matching procedure is an iterative process driven by flow optimization
which, in turn, depends only on local features, and is thereby
unaffected by local perturbation. To demonstrate the framework's
robustness, we performed four perturbation experiments on the COIL-20
database. The experiments are identical to the COIL-20 experiment above,
except that the query graph was perturbed by adding/deleting 5%,
10%, 15%, and 20% of its nodes (and their adjoining edges). The
results are shown in Table 1, and reveal that the
error rate increases gracefully as a function of increased
perturbation.
Table 1:
Recognition rate as a function of increasing perturbation.
Note that the baseline recognition rate (with no perturbation) is 95.2%