Dynamic Face Recognition Using Identity Surfaces
Yongmin Li,
Shaogang
Gong and Heather Liddell
Department of Computer Science
Queen Mary, University of London
1. Introduction
Recognising faces with large pose variation is a
challenging problem owing to the severe nonlinearity caused by
rotation in depth, self-shading and self-occlusion. The traditional
techniques like probability estimation or template matching usually
cannot solve this problem satisfactorily. However, it can be solved
more efficiently if the pose information is explicitly used. Based on
this idea, we developed a method of multi-view face recognition using
identity surfaces. The basic idea of the identity surfaces is similar
to the parametric eigenspace method presented by Murase and Nayar [4,5].
2. Identity Surfaces
An identity surface of a face class (all
face patterns belonging to one subject) is referred to as a unique
hyper surface in a feature space. If we only focus on the variation
of facial appearance from pose change, the feature space can be
constructed as a pose parameterised feature space. As shown in Figure 1, the two basis coordinates
stand for the head pose: tilt and yaw, and the other coordinates are
used to represent the discriminating features. For each pair of tilt
and yaw, there is one unique "point" for a face class. The
distribution of all these "points" of a same face class forms a
hyper surface in this feature space. We call this surface an identity
surface.
|
Figure 1: Identity surfaces for dynamic
face recognition.
Using identity surfaces, face recognition can be performed dynamically
rather than statically from a video input. As shown in Figure 1, when a face is detected and
tracked in an input video stream, one obtains the object
trajectory of the face in the feature space. Also, its projection
onto each of the identity surfaces with the same pose
information and temporal order forms a model trajectory of the
specific face class. It can be regarded as the ideal trajectory of
this face class encoded by the same spatio-temporal information (pose
information and temporal order from the video sequence) as the tracked
face. Then face recognition can be carried out by matching the object
trajectory with a set of model trajectories. Compared to face
recognition on static images, this approach can be more reliable and
accurate. For example, it is difficult to decide whether the pattern X
in Figure 1 belongs to subject A
or B for a single pattern. However, if we know that X is tracked along
the object trajectory (red curve), it is more likely to be subject A
than B [3].
3. Constructing Identity Surfaces
If sufficient patterns of a face class in different views are available,
the identity surface of this face class can be constructed precisely. However,
we do not presume such a strict condition. In this work, we develop a method
to synthesise the identity surface of a face class from a small sample
of face patterns which sparsely cover the view sphere. These face patterns
can be conveniently acquired, for example, by recording a small video sequence
of a subject to be recognised. The basic idea is to approximate the identity
surface using a set of Np planes separated by a number of Nv predefined
views. The problem can be finally defined as a quadratic optimisation problem
which can be solved using the interior point method.
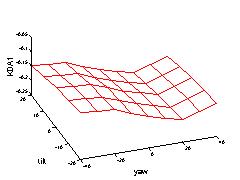
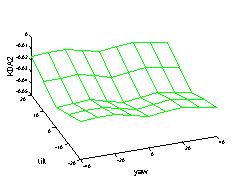
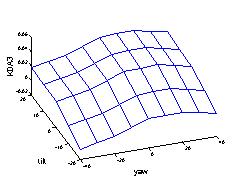
|
Figure 2: The identity surface
synthesised from 15 prototype patterns. Only its projections in the
first three dimensions of the discriminating feature are shown
here. The two basis axes are pose in tilt and yaw, and the vertical
axis is the discriminating feature.
Figure 2 shows the synthesised
identity surface from only 15 views. A ten-dimensional discriminating
feature vector is used in this example. For clarity, only the first
three dimensions is shown here.
4. Dynamic Face Recognition
We demonstrate the performance of
this approach on a small scale multi-view face recognition
problem. Twelve sequences, each from a set of 12 subjects, were used
as training sequences to construct the identity surfaces. The number
of frames contained in each sequence varies from 40 to 140. A
multi-view face model [2] was
fitted on these sequences to obtain the normalised facial texture
patterns. Kernel Discriminant Analysis (KDA) [1] was adopted to extract the
discriminating features. The identity surfaces were then constructed
from these KDA features and their corresponding pose. Then
recognition was performed on new test sequences of these subjects.
Also, the same face model and KDA were applied. Figure 3 shows the sample images fitted by
the multi-view face model and the normalised facial texture patterns
from a test sequence.
|
Figure 3: Sample frames, fitted 3D shape
patterns, and the normalised facial texture patterns from a test sequence.
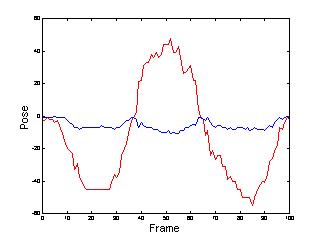
Figure 4 shows the estimated pose in
tilt and yaw.
|
Figure 4: Pose in tilt (blue) and yaw
(red).
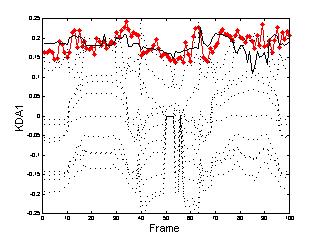
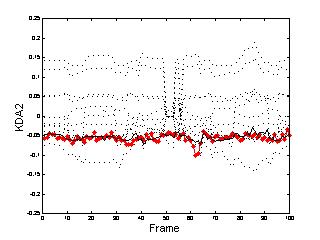
Figure 5 shows the object and
model trajectories in the first two dimension of the discriminating feature.
|
Figure 5: The object trajectory (red) and
model trajectories in the first KDA dimension (solid line for the one from
the ground-truth subject).
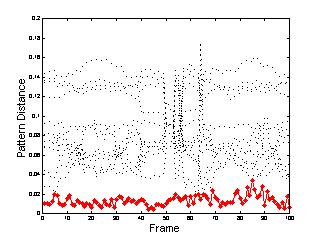
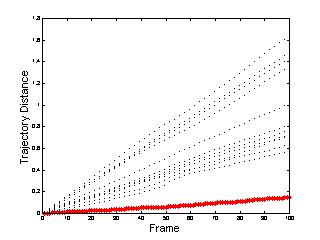
Figure 6 demonstrates the
performance of dynamic face recognition using the trajectory distance
with comparison to that of static face recognition using pattern
distance on individual frames. The pattern distance is computed
between an object pattern and its corresponding point on each of the
identity surfaces, while the trajectory distance is the summation of
the pattern distance over time. It is noted that the trajectory
distance provides a more reliable performance, especially its
accumulated effects over time.
|
Figure 6: Recognition results using trajectory
distance (right) with comparison to those using pattern distance from individual
frames (left).
Yongmin Li 2001-10-14