This page is outdated; it will be updated when I am able to do so.
Motivation: Information processing, problem-solving and data abstraction are key concepts in every scientific discipline (e.g., engineering, biology and social sciences). However, very few educational programs focus on teaching these skills (especially in schools). I use robots and software simulations in outreach activities to teach these computing skills that form the basis of engineering and science. A
carefully designed hands-on session with robots can do a lot to motivate engineering and science education, and supplement the theory learned in a classroom. I look at outreach events as opportunities to engage motivated undergraduate students and school students. For an illustrative example of interfaces we use to engage school students, look at the
DOROTHY project.
- Summer 2013:
Our NSF Research Experiences for Undergraduates (REU) Site project was renewed and co-hosted by Industrial Engineering and Computer Science at Texas Tech University. The project descriptions are available online.
2013 flyer
Student Projects and Posters
See below for details of projects that I supervised (and co-supervised) in 2012.
- Fall 2012:
We conducted demonstrations for middle school and high school students who visited our lab. Here are some images from the Catch the Engineering Bug event for high school girls. Our robots (and graduate students) did their bit to keep the school students entertained :-)




- Summer 2012:
I was co-PI on an NSF Research Experiences for Undergraduates (REU) Site project, which was co-hosted by Industrial Engineering and Computer Science at Texas Tech University.
2012 flyer
Student Projects and Posters
An article in the Texas Tech Today magazine on our REU program.
See below for details of projects that I supervised (and co-supervised) in 2011.
We conducted a session for middle-school students hosted on campus for the Science It's A Girl Thing summer camp organized by The Institute for the Development and Enrichment of Advanced Learners (IDEAL). Here are a couple of images of the group of students -- the (undergraduate and graduate) students who did all the teaching are seen at the back of the group.


We conducted a session for high-school students hosted on campus for the Native American Summer Bridge Institute (NASBI) organized by the TTU Division of Institutional Diversity, Equity and Community Engagement (web link) -- here are some images of the session.




- Spring 2012:
We started the semester with a visit by students and teachers from Kelton ISD in Texas. Below are some images from the event -- the students and teachers drove ~4hours to get to Texas Tech University and we had to make sure they had some fun :-)




For other images of lab visits and presentations, look here.
- Fall 2011:
In addition to lab visits by local school students, the robots feature in presentations at local schools. Some images from a presentation in a science fair at a local elementary school are shown below---you can see one of the Naos observing the presentation in the third image:-)



For other images of lab visits and presentations, look here.
- Fall 2011--Spring 2012: I was one of the faculty members selected for the Institute of Inclusive Excellence, organized by Texas Tech University's Division of Institutional Diversity (Fall 2011, Spring 2012). The institute aims to promote diversity on campus by discussing efforts at institutions in the country.
- Summer 2011:
I was co-PI on an NSF Research Experiences for Undergraduates (REU) Site project, which is co-hosted by Industrial Engineering and Computer Science at Texas Tech University.
2011 flyer
Student Projects and Posters
- Summer 2010:
I organized a summer workshop for 8th and 9th grade students, between 12-23 July 2010. The students were drawn from the Academy of Technology, Engineering, Math and Science (ATEMS, a STEM academy) in Abilene, Texas. This workshop was a result of support and encouragement from ATEMS, Abilene Independent School District (AISD), Texas Tech College of Engineering Outreach and the Texas Tech Higher Education Site at Abilene. More details on the workshop activities can be found here: Abilene Summer Workshop 2010.
Students have the choice of working with any of the robots in my lab (see below and my
research page). Middle-school and high-school students typically work with
flukes, the little blue robots created by the Institute for Personal Robots in Education (
IPRE). These robots consist of a
fluke board mounted on a
scribbler base (more details
here), and they can be programmed using Python/C++/Java commands (you can look at the
API). The students work in teams to learn about computing concepts (e.g., data structures, looping, control structures and functions) while programming the flukes to perform tasks such as pattern generation, target tracking, obstacle avoidance and team coordination. The interaction between the students and the robots also helps us evaluate some of our robot learning and decision-making algorithms. The school students therefore indirectly "train" our robots to perform better :-)
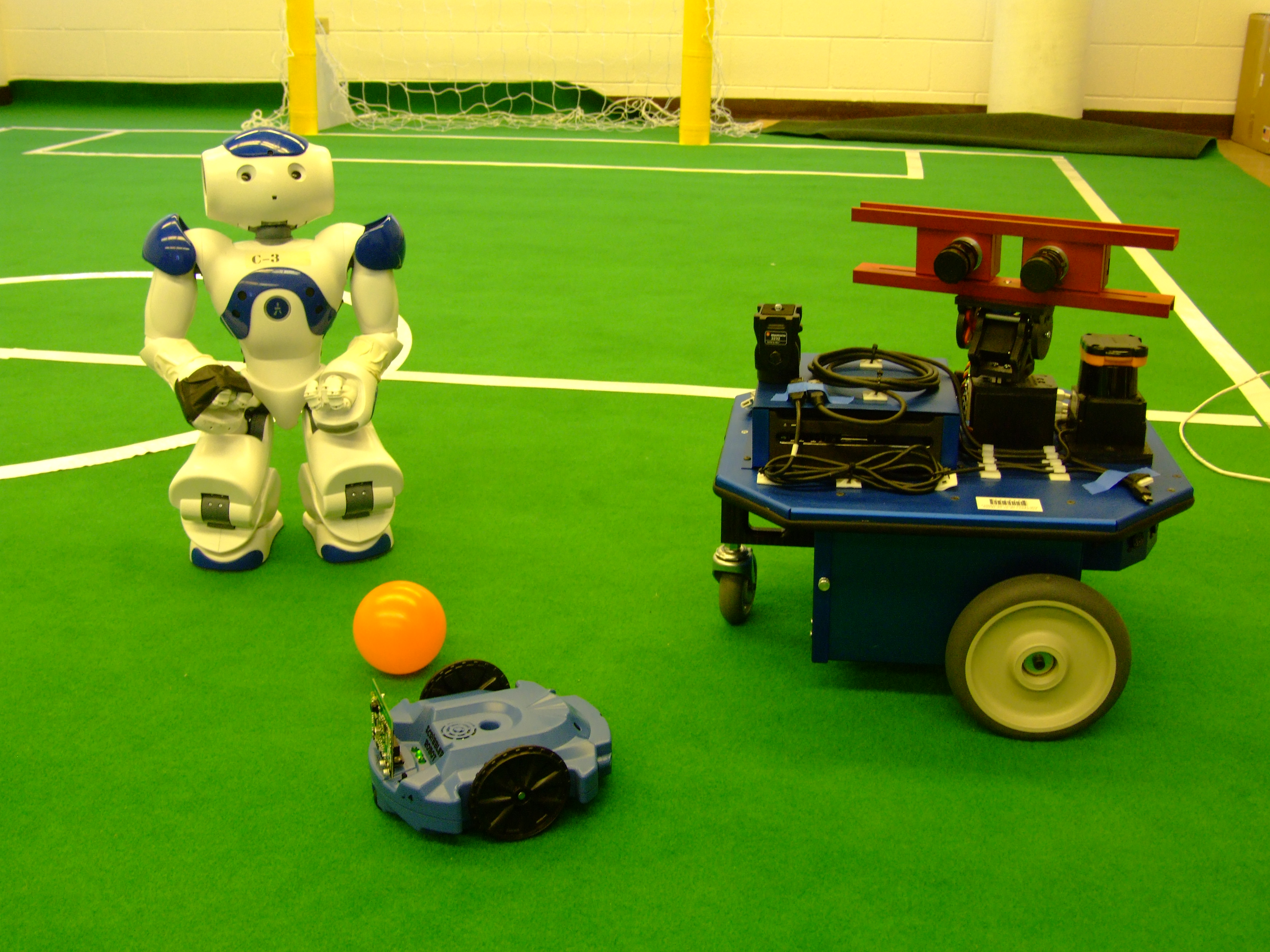
The following images and videos help illustrate the capabilities of the flukes. We begin with an image of the fluke along with a representative of the humanoid robots (Nao) and the wheeled robots (Videre ERA-Mobi) that are used as experimental platforms for the
research performed in my lab.

Next, the following movies show the flukes performing some simple tasks. The students participating in the summer workshops typically develop code for these and other similar tasks.
-
Square pattern + Draw "TTU": In the first video, the fluke is trying to chart out a square pattern. In the second video, the fluke is trying to draw out the alphabets "TTU"---the pattern would be more visible with a marker at the center of the robot, but we cannot have the robot messing up the soccer field. Although the behavior is not optimal due to slippage, the robot "celebrates" at the end by spinning around in joy!


-
The great escapes: In the first video, the fluke is trying to escape from the other robots and obstacles using its IR sensor and some visual computation. The second video, based on the code written by an undergraduate student intern (Kshira), shows the robot operating much better than in the first video :-)


Next, the following images were captured using the fluke's camera. The image resolution and quality may not be great, but I can assure you that the images are better than those obtained from other robots that are a lot more expensive :-)



The following images and video illustrate the fluke's image processing capabilities. The images shows the result of a simple image segmentation operation performed on the camera image to detect the orange ball. Segmentation is performed by having the robot extract blobs of pixels whose values fall within limits specified manually. There is a weird horizontal displacement between the original image and segmented image! The third image is a video of the robot finding the ball, centering it in the image and moving towards it.