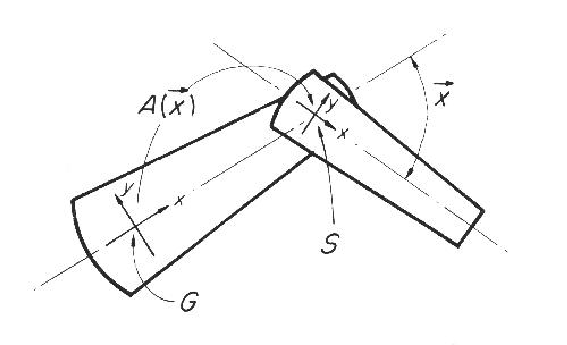
Subcomponents whose attachment is only partially constrainted (such as the lowerarm ASSEMBLY of a PUMA robot) also need to be aggregated. As the subcomponent has been recognized previously, its coordinate frame must be consistent with the object's, given the degrees-of-freedom inherent in the modeled relationship between their respective coordinate frames. At the same time, the test also binds the values for the remaining degrees-of-freedom in the coordinate relationship. This results in numerical values being bound in the particular hypothesis context for the symbolic variables used in the model definition (Chapter 7). Figure 9.21 illustrates the partially constrained subcomponent attachment process.
The matching and binding is by a "numerical" unification process:
| Let: | |
| Then: | |
| Compare |
|
| Where |
|
| Where |
|
The results for the correct partially constrained subcomponent aggregations are summarized in Table 9.13. All correct bindings were made, and the table shows that the connection parameters were estimated well. Most of the incorrect combinatorial subcomponent groupings were eliminated during the binding process because of inconsistent reference frames, so this was also a benefit.
In the test scene, one binding occurred between inappropriate hypotheses, when constructing the armasm ASSEMBLY. Because of symmetry, each of its two subcomponents (upperarm and lowerarm) had two hypotheses. Hypothesis pairing produced four pairs, of which two passed the above test. Only one should have passed, but because of the tolerances on reference frame estimates, it was not possible to eliminate the grouping that placed the lower arm behind the upper arm solely by using geometric constraints. Self-occlusion analysis during verification (Chapter 10) did eliminate the extra hypothesis, however.