Invocation of SURFACEs is largely based on summary characteristics (e.g. areas), rather than detailed shape. As surface regions are characterized by their boundaries and internal shapes, verification could then ensure that:
Several problems complicate this approach: unmodeled extremal boundaries on curved surfaces, inexact boundary placement at surface curvature discontinuities, and information lost because of occlusion.
As extremal boundaries are not modeled, they should not be considered, except perhaps for verifying that the surface has the appropriate curvature directions.
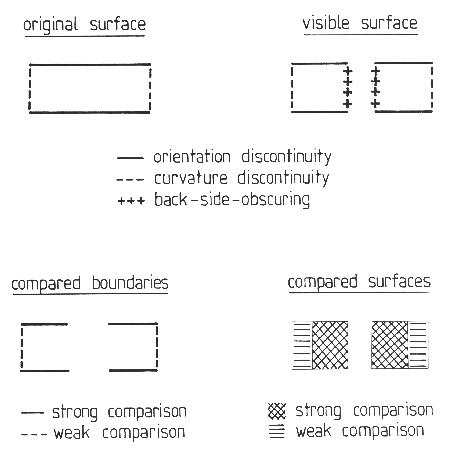
The second problem causes variable sized surface regions and hence makes it difficult to compare surfaces and boundaries exactly. But, some possibilities remain. In particular, all model boundaries are either orientation or curvature discontinuity boundaries. The former should remain stable and appear as either predictable shape segmentation or front-side-obscuring boundaries. Detailed shape analysis may distinguish front-side-obscuring boundaries arising from orientation discontinuities from extremal boundaries. Curvature discontinuity boundaries should probably be ignored.
Occlusion causes data loss, but is detectable as the back-side-obscuring boundaries associated with the surface indicate the initial point of occlusion. As the visible data must be a subset of the predicted data, the back-side-obscuring boundary must be internal to the predicted surface. Concave boundaries are also ambiguous regarding surface ordering, so may not be true surface boundaries.
Figure 10.2 illustrates these points, which are summarized as:
Because of errors in estimating SURFACE reference frames, it was
difficult to predict surface orientation and boundary locations
accurately enough for direct comparison.
As a result, only test ![]() was implemented:
was implemented:
| Let: | ||
| If: | ||
|
|
||
|
|
||
|
|
||
| (planar surfaces do not use this last test) | ||
| Then: | the proposed identity of the surface is accepted. | |