


Next: Bibliography
Hand Tracking
Jamie Sherrah and Shaogang Gong
Tracking human body parts and motion is a challenging but essential
task for modelling, recognition and interpretation of human behaviour.
In particular, tracking of at least the head and hands is required for
gesture recognition in human-computer interface applications such as
sign-language recognition. Existing methods for markerless tracking
can be categorised according to the measurements and models
used [5]. In terms of measurements, tracking
usually relies on intensity information such as
edges [6,2,13,4],
skin colour and/or motion
segmentation [19,10,7,12],
or a combination of these with other cues including
depth [9,19,14,1].
The choice of model depends on the application of the tracker. If the
tracker output is to be used for some recognition process then a 2D
model of the body will
suffice [12,7]. On the other hand, a
3D model of the body may be required for generative purposes, to drive
an avatar for example, in which case skeletal constraints can be
exploited [19,14,4],
or deformable 3D models can be matched to 2D
images [6,13].
When tracking multiple overlapping objects such as human head and
hands under real-world conditions, three main problems are
encountered: ambiguity, occlusion and motion discontinuity.
Ambiguities arise due to distracting noise, mis-matching of the
tracked objects, and the possibility of occlusion. If the objects are
part of the same articulated entity, such as the human body, domain
knowledge can be used to resolve some of the ambiguities. A common
and robust approach for real-time tracking is to combine multiple
visual cues [17,18]. However, in
the domain of cues such as skin colour and motion, occlusion still
presents a problem because body parts such as hands can become
virtually indistinguishable. Therefore joint tracking of the body
parts must be performed with an exclusion principle on observations
[15,11]. Often depth
information and temporal dynamic models are exploited to overcome the
occlusion problem, for example
[19,10]. However depth
information requires multiple cameras, and introduces its own problems
of calibration and inaccuracy. Further, spatio-temporal continuity
cannot always be assumed as the basis for tracking. Often body motion
may appear discontinuous since the hands can move quickly and
seemingly erratically, or undergo occlusion by other body parts.
Therefore methods such as Kalman filtering that are strongly reliant
upon well-defined dynamics and temporal continuity are generally
inadequate. On the other hand, a wide range of domain knowledge beyond the
visual input is typically utilised by a human observer to reduce
reliance on spatio-temporal consistency.
The problem of tracking a person's head and hands in 2D from a single
camera view is addressed in [16]. To deal with
noise and ambiguity problems, a view-based data fusion approach is
adopted. Inexpensive visual cues, namely motion, skin colour and
coarse intensity-based orientation measures are extracted from a
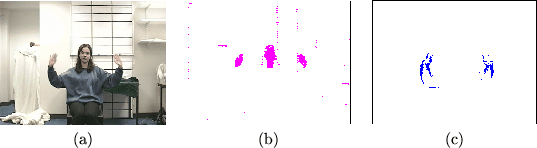
near-frontal view of a subject. Examples of these cues are shown in
Figure 1. Skin colour and motion are natural cues for
focusing attention and computational resources on salient regions in
the image. The hand orientation information is used to disambiguate
the hands when they cross over in the image. Note that although
distracting noise and background clusters appear in the skin image,
these can be eliminated at a low level by ``AND''ing directly with
motion information. However, fusion of these cues at this low level
of processing is premature and causes loss of information. For
example, the motion information generally occurs only at the edges of
the moving object, making the fused information too sparse. In this
approach the cues are fused at a higher level using a Bayesian Belief
Network.
Figure 1:
Example of visual cues measured from video stream: (a) original image; (b) binary skin colour image; and (c) binary motion image.
 |
Under the assumption that the subject is approximately facing the
camera, the head skin cluster can be tracked reliably using the mean
shift algorithm dispite occlusion by the hands [3]. A
sequential connected components algorithm [8] can then
applied to a sub-sampled image to obtain a list of skin-coloured pixel
clusters in the image. Under the assumption that the head and hands
form the largest moving connected skin coloured regions in the image,
tracking the head and hands reduces to matching the previously tracked
body parts to the skin clusters in the current frame. However, skin
clusters can be indistinguishable, and only discontinuous information
is available as though a strobe light were operating, creating a
``jerky'' effect.
Moving body parts are not merely independent dynamic objects in
isolation. They correlate closely for a functional purpose,
especially when they are used to express certain semantic expressions
or behaviour. Let us now examine more closely the nature of the
underlying knowledge when we try to successfully associate and track
interacting body parts.
For instance, we know that at any given time a hand is either:
- 1.
- associated with a skin colour cluster,
or
- 2.
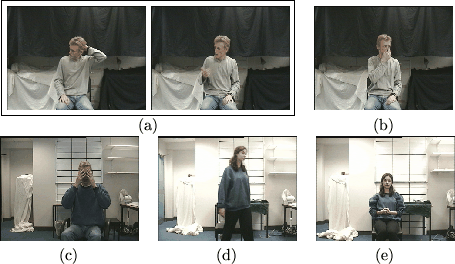
- it occludes the face (and is therefore ``invisible'' using only
skin colour) as in Figures 2(b)
and (c), or
- 3.
- it has disappeared from the
image as in Figure 2(d).
When considering both hands, the possibility arises that both hands
are associated with the same skin colour cluster, as when one clasps
the hands together for example, shown in
Figure 2(e).
Figure 2:
Examples of the difficulties associated with tracking the body: (a) motion is discontinuous between frames; (b) one hand occludes the face; (c) both hands occlude the face; (d) a hand is invisible in the image; and (e) the hands occlude each other.
 |
We assume that only the two largest skin clusters other than the head
can potentially be hands. Note that one body part can only correspond
to one cluster, but a cluster may correspond to one, two or three of
the body parts. Some examples of possible scenarios are:
- 1.
- Three clusters observed: One corresponds to the head, one to the left hand, and one to the right.
- 2.
- Two clusters observed: One corresponds to the head, the other to clasped hands.
- 3.
- One cluster observed: Both hands occlude the face, or are missing from the screen.
At first glance the situation seems trivial, however there are many
other possibilities. In scenario 1, one of the clusters may
be a distracting background object, in which case the remaining
non-head cluster may correspond to one hand, or both hands. In
scenario 2, one hand may occlude the face and the other
correspond to the non-head cluster, or the cluster may not be a hand
at all.
Given such contextual knowledge, the task is to determine which of the
skin-coloured clusters corresponds to each body part.
In [16], a discrete Bayesian network was used
to probabilistically consider these possibilities and infer the most
likely associative configuration.
Next: Bibliography
Shaogang Gong
2001-05-29