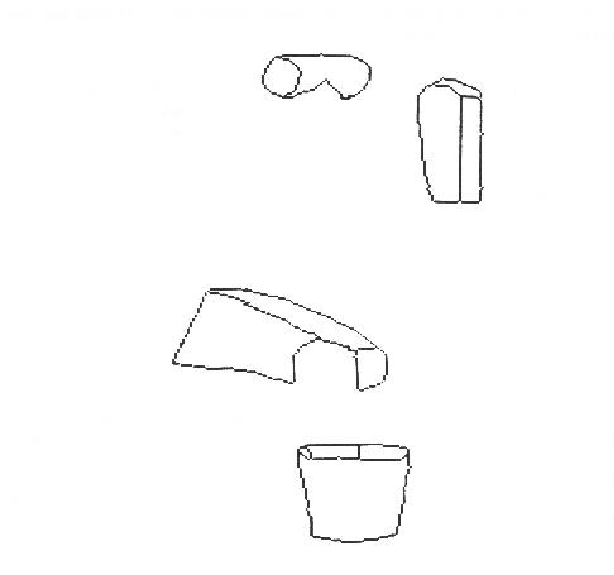
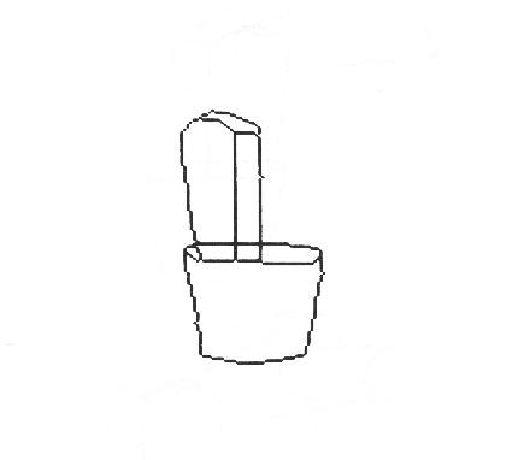
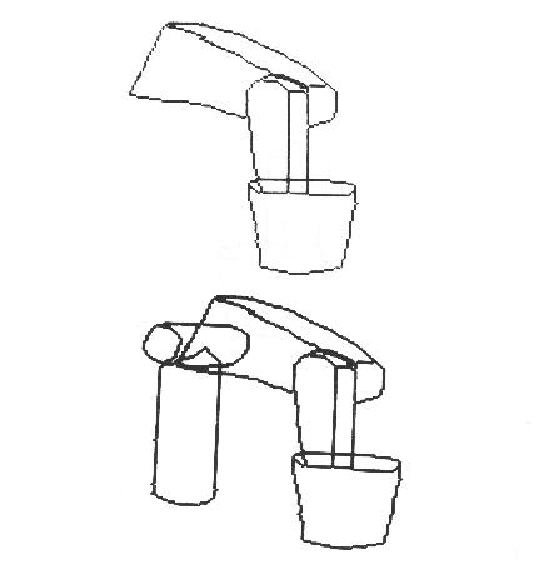
To show that the implemented computation produced suitable results, an example is given here, using the surface hypotheses of the test image (see Figure 4.8). Some of the surface clusters for this scene are shown in Figures 5.5, 5.6 and 5.7.
As can be seen in these examples,
the surface clusters form object level "chunks" of the image, and
correspond to the primitive ASSEMBLYs of the models given in
Chapter 7.
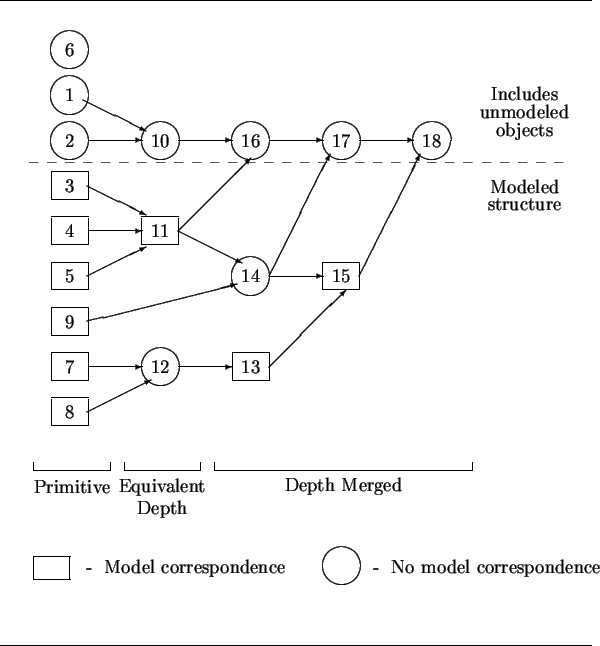
In Table 5.1, there is a listing of the surface cluster to model
ASSEMBLY correspondences for the test image.
Clearly, the surface cluster formation process isolates the key features into what
corresponds to structurally based intuitive "objects".
| SURFACE CLUSTER | CLUSTER TYPE | IMAGE REGIONS | MODEL |
|---|---|---|---|
| 1 | PRIMITIVE | 20,21,30 | |
| 2 | PRIMITIVE | 27 | |
| 3 | PRIMITIVE | 16,26 | robshldbd |
| 4 | PRIMITIVE | 8 | robbody |
| 5 | PRIMITIVE | 29 | robshldsobj |
| 6 | PRIMITIVE | 33,34,35,36,37 | |
| 7 | PRIMITIVE | 12,18,31 | lowerarm |
| 8 | PRIMITIVE | 9,28,38 | trashcan |
| 9 | PRIMITIVE | 17,19,22,25,32 | upperarm |
| 10 | EQUIVALENT | 20,21,27,30 | |
| 11 | EQUIVALENT | 8,16,26,29 | robshould + robbody |
| 12 | EQUIVALENT | 9,12,18,28,31,38 | lowerarm + trashcan |
| 13 | DEPTH | 9,12,17,18,19,22,25,28,31,32,38 | armasm + trashcan |
| 14 | DEPTH | 8,16,17,19,22,25,26,29,32 | |
| 15 | DEPTH | 8,9,12,16,17,18,19,22,25,26,28,29,31,32,38 | link + robot + trashcan |
| 16 | DEPTH | 8,16,20,21,26,27,29,30 | |
| 17 | DEPTH | 8,16,17,19,20,21,22,25,26,27,29,30,32 | |
| 18 | DEPTH | 8,9,12,16,17,18,19,20,21,22,25,26,27,28,29,30,31,32,38 |
For the example above, the primitive and equivalent depth surface clusters are appropriate. What seems to be a problem is the number of depth merged surface clusters, which depend on combinatorial groupings of equivalent depth surface clusters. For the test scene, there are 9 primitive, 3 equivalent depth and 6 depth merged surface clusters. Here, the number of depth merged surface clusters is not such a problem as the object also has a strong depth order, so 2 of the 6 correspond to ASSEMBLYs. In other test images, shallower depth ordering causes more serious combinatorial grouping. Hence, an alternative process should be considered.
Though several surface clusters contained multiple ASSEMBLYs, this caused no recognition failures.