


Next: Experiments
Up: Recognition phase
Previous: Histogram-similarity criteria
Drawing a tiny, random subset of all features, we can safely assume individual
samples to be statistically independent of each other.
The logarithmic likelihood of object  , described by database histogram
, described by database histogram
 , given the sensed subsample
, given the sensed subsample
 of features, thus is
of features, thus is
 |
(16) |
The mapping  is as defined in Equation (9).
In contrast to the Kullback-Leibler divergence (15), all logarithms
can here be calculated in the training phase and logarithmic histograms
is as defined in Equation (9).
In contrast to the Kullback-Leibler divergence (15), all logarithms
can here be calculated in the training phase and logarithmic histograms
 can be stored.
can be stored.
Figure 2:
The 20 objects of the database.
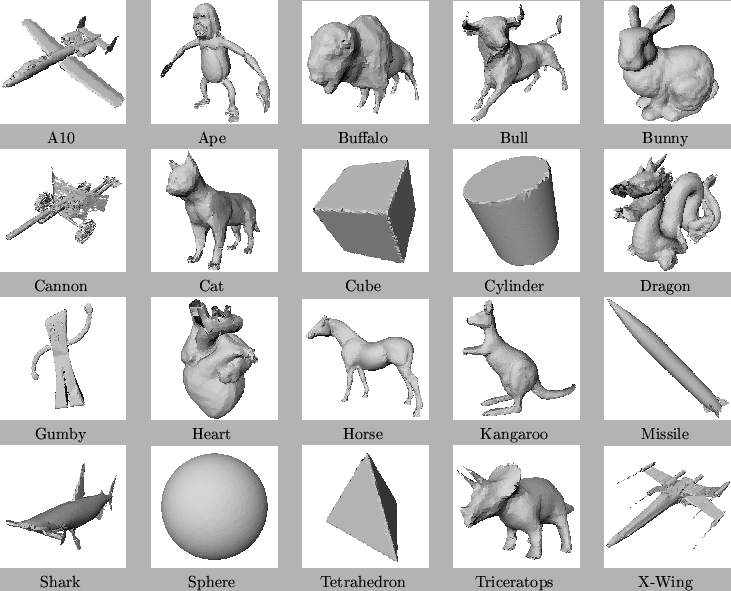 |
Table 1:
In this test, the six classifiers defined in Section 4 are evaluated using
randomly drawn feature
samples from complete and noise-free surface meshes of the 20 objects
shown in Figure 2.
Achieved recognition rates are given in percent.
The processing times are measured on a standard PC with an Intel
Pentium IV 2.66 GHz processor and Linux as operating system.
| criterion |
recognition in % |
time in ms |
 |
42.7 |
5.12 |
 |
40.6 |
5.01 |
 |
75.4 |
6.16 |
 |
45.5 |
6.25 |
 |
99.6 |
7.42 |
 |
99.7 |
4.79 |
Figure 3:
The six arrays represent classification results for the 20 objects shown
in Figure 2 using the six different criteria defined in
Section 4.
Surfaces are completely visible and data are noise free.
In each array, columns represent test objects, rows trained objects.
Grey values indicate the rate of classification of a test object as
a trained object;
a brighter shade means a higher rate.
The more distinct the diagonal, the higher the allover performance of the
classifier.
Evidently, the and criteria achieve almost perfect
classification within our database of objects.
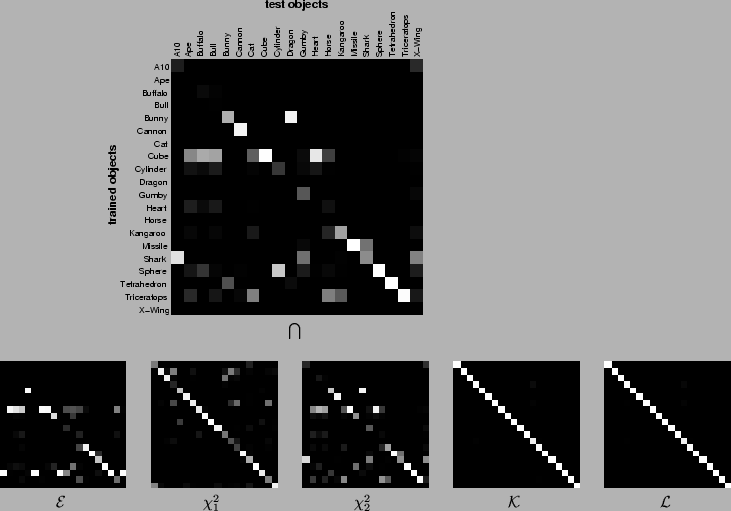 |
Figure 4:
(a) X-wing;
(b) X-wing with noise (4%);
(c) partially visible X-wing (33%).
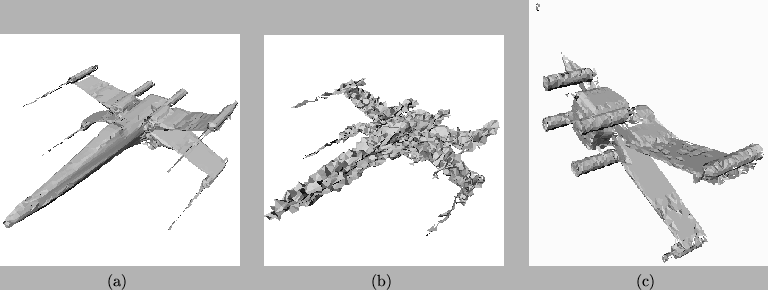 |
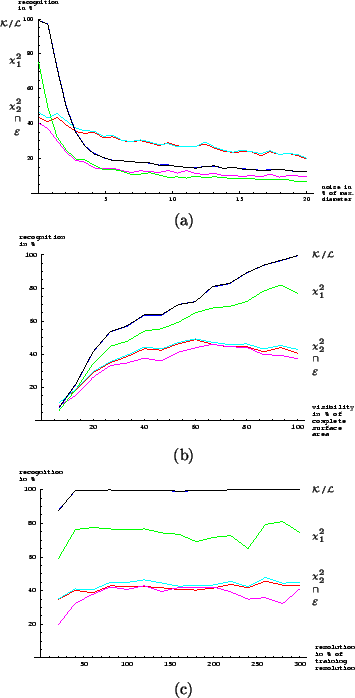
Figure 5:
Plots of recognition rates for the 20 objects shown in
Figure 2 using the six different criteria defined in Section 4.
The conditions for the test data are varied;
(a) varying level of noise (in percent of maximal object diameter);
(b) varying visibility (in percent of complete surface area);
(c) varying mesh resolution (in percent of training resolution).
The curves for the and criteria nearly coincide in
all three graphs.
 |
Next: Experiments
Up: Recognition phase
Previous: Histogram-similarity criteria
Eric Wahl
2003-11-06