Constructing complete models usually requires multiple scans of an object or scene. Because of the desire to reduce acquisition costs by minimizing the number of scans while still maintaining complete coverage, researchers have developed view planning algorithms. From our experience with laser-based range sensors, we realized that view planning had to include a surface quality measure [35], quantifying how close the observation angle was to the surface normal at each surface point.
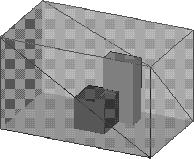
When we applied the view planning approach to even simple scenes [43] (see Figure 8), we found that approximately 110 views with a typical 60 degree aperture sensor were needed to observe every part of the scene. About another 100-200 were needed to observe every surface point with high accuracy. This number of scans is clearly not feasible (unless a wide-field of view panoramic sensor is used [29]). The main cause of the need for so many scans is occlusion, where closer parts of the object or scene hide more distant parts. To obtain the missing parts, we need to position the scanner at many additional places to acquire increasingly smaller unscanned portions of the data. While there has been much previous work on viewplanning (e.g. [37,51]), this work dealt with simple nearly convex objects, and so did not encounter the problems arising from having many inter-part or object occlusions.
Since this problem arises with even very simple parts and scenes, there probably is no ``scanning'' based solution to the problem. Hence, we have been investigating model and knowledge-based shape hypothesizing methods.
Standard shapes allows recovery of unobservable shape and texture
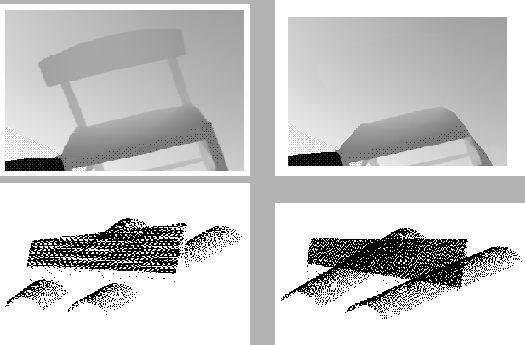
We have been recently investigating knowledge-based hypothetical reconstruction of unobserved surfaces [14,50]. There is work on recognizing objects from range data, considering occlusions [36], but here we are attempting to recover from them. The key to reconstruction is the knowledge that the shape of the unobserved surface is usually the same as the observed portion of a surface [23,34]. This allows us to project surfaces into occluded areas. As many simple surfaces have infinite extent, this requires also an estimate of the unobserved boundary [10]. We have applied this recovery process to planar and cylindrical surfaces, examples of which appear in Figure 9. Given the recovery of the surface shape, we have also been investigating [49] recovery of the surface appearance [15]. In this case we exploit consistency of the appearance - namely either constant reflectance or repeating texture. Figure 10 shows reconstructed texture on a reconstructed cylindrical surface.
 |