The surfaces of man-made objects typically have fixed surface areas, and many natural objects also have surfaces whose areas fall within constrained ranges. Thus surface area is a good constraint on the identity of a surface. Consequently, we would like to estimate the absolute surface area of a segmented surface region, which is possible given the information in the surface image. Estimation applies to the reconstructed surface hypotheses (Chapter 4).
The constraints on the estimation process are:
The effects of surface curvature are approximately overcome using two
correction factors for the principal curvatures, which
are calculated in the following manner.
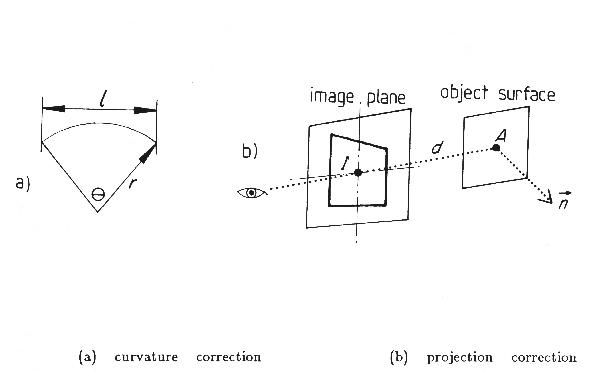
In Figure 6.11 part (a), the case of a single dimension is considered.
A curved segment of curvature ![]() subtends an angle
subtends an angle ![]() .
Hence, it has length
.
Hence, it has length ![]() .
This appears in the image as a straight segment of length
.
This appears in the image as a straight segment of length ![]() .
So, the curvature correction factor relating the length of a curved segment
to the equivalent chord is:
.
So, the curvature correction factor relating the length of a curved segment
to the equivalent chord is:
Now, referring to Figure 6.11 part (b), the absolute surface area is estimated as follows:
| Let: | |
| of object length when seen at one centimeter distance | |
| Then, the slant correction relating projected planar area to true | |
| planar area is given by: | |
|
|
|
| and the absolute surface area is estimated by: | |
|
|
|
The ![]() term converts one image dimension from pixels to
centimeters, the
term converts one image dimension from pixels to
centimeters, the
![]() term accounts for the surface being slanted away
from the viewer, and the
term accounts for the surface being slanted away
from the viewer, and the ![]() term accounts for the surface being curved
instead of flat.
term accounts for the surface being curved
instead of flat.
In the test image, several unobscured regions from known object surfaces are seen.
The absolute surface area for these regions is estimated
using the computation described above, and the results are summarized
in Table 6.8.
Note that the estimation error percentage is generally small, given the range of surface sizes. The process is also often accurate, with better results for the larger surface regions and largest errors on small or nearly tangential surfaces. The key sources of error are pixel spatial quantization, which particularly affects small regions, and inaccurate shape data estimation.
From the above discussion, the estimation process is obviously trivial, given the surface image as input. Since the goal of the process is only to acquire a rough estimate, the implemented approach is adequate.