The estimation of an ASSEMBLY's reference frame is demonstrated for the robot lower arm.
As the rigidly attached hand subcomponent is not visible, it contributes
no information.
Each of the SURFACEs paired and transformed according to the above theory
contributes to these estimates (in the camera coordinate system):



Translation is estimated after rotation, and starts with an
estimate from each individual SURFACE.
These estimates are:
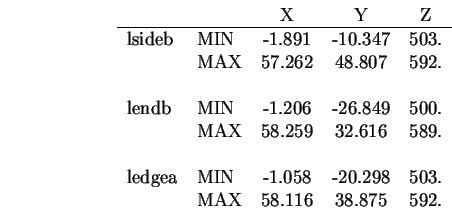
The translation estimates are integrated by intersection to give the following
result:



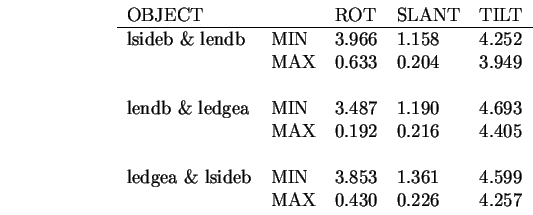
Tables 9.5 and 9.6 summarize the results for
the primitive ASSEMBLYs in the test image whose estimates resulted from using more than
one SURFACE.
The other primitive ASSEMBLYs have reference frames identical to that
of the single SURFACE (rotated into the ASSEMBLY's reference frame if
necessary).
All results are given in the camera coordinate system.
The parameter estimates are good, even though both the
upper and lower arm are substantially obscured.